Introduction
La rééducation du membre supérieur assistée par robot consiste en une pratique répétitive de tâches dirigées, exercices et activités des membres supérieurs, en utilisant un dispositif ou système robotisé. Cette rééducation est offerte dans le but d’améliorer la fonction du membre supérieur post-AVC, et peut être utilisés en phase aiguë, subaiguë et chronique de récupération suivant un AVC. Les participants se livrent généralement à des exercices fonctionnels dans différents modes d’implication (par exemple, dans un mode passif, passif assisté ou actif), qui sollicitent différents groupes musculaires (par exemple, de l’épaule et du coude vs du poignet et des doigts), et qui peuvent être effectués en position horizontale et/ou verticale.

Veuillez cliquer ici pour visualiser le tableau suivant en format pdf.
Dispositif
| Visée
| Type d’implication
| Rétroaction
| Degré de liberté
| Type d’exercices
| Design
|
Active Joint Brace for the Elbow
| Proximale
| Assistance active
| Kinesthésique, proprioceptive, sensitivité tactile et visuelle.
| N/A
| Flexion et extension du coude lors de tâches fonctionnelles arrimées aux capacités motrices de chacun.
| Exosquelette mobile, puissance contrôlée par EMG
|
ARMGuide
| Proximale
| Active-assistée
| Graphique sur la position de la main et sur l’apport de l’assistance motrice
| 3
| Mouvements d’atteinte dans différentes directions.
| Actionné-simple
http://www.rehab.research.va.gov/jour/00/37/6/reink376.htm
 |
ARMin I et ARMin II
| Proximale et distale
| Passive et active
| Visuelle et auditive
| 6 actionnés indépendamment et 1 couplé
| Exercices répétitifs fonctionnels avec une station de travail 3D
| Exosquelette
http://cabrr.cua.edu/devicegallery.cfm
|
BATRAC
| Proximale
| Passive
| Auditive
| N/A
| Exercices de pousser et de tirer dans un mode bilatéral.
| Terminal d’interaction robotisé
http://medicalxpress.com/news/2011-09-rewiring-brain-regain.html
 |
BFIAMT
| Proximale
| Bilatérale active passive, bilatérale réciproque, bilatérale passive, bilatérale symétrique.
| Visuelle
| N/A
| Exercices de pousser et de tirer.
| Terminal d’interaction robotisé
|
Bilateral Forearm et Wrist Trainer
| Distale
| Passive, active.
| N/A
| 1
| Mouvement de supination de l’avant-bras et de dorsiflexion/flexion palmaire du poignet ; bimanuel et pratique répétitive.
| Terminal d’interaction robotisé
|
Bi-Manu-Track
| Distale
| Passive-passive, passive-active, active-active.
| Visuelle
| 1
| Pronation et supination bilatéral du coude, flexion et extension du poignet dans un miroir ou dans un mode parallèle.
| Terminal d’interaction robotisé
http://www.reha-stim.de/cms/index.php?id=60
 |
Braccio di Ferro
| Proximale
| Contrôle adapté de l’assistance du robot
| Visuelle sur la position de la main, tactile
| 2
| Mouvement de l’épaule et du coude dans un plan horizontal lors d’activité dirigée.
| Actionné
http://www.reha-stim.de/cms/index.php?id=60
http://www.reha-stim.de/cms/index.php?id=60
 |
GENTLE/S
| Proximale
| Passive, active assistée ou active.
| Interface tactile par réalité virtuelle.
| 3
| Mouvements d’atteintes de la main à la bouche.
| Exosquelette
http://www.mimics.ethz.ch/index.php?page_id=2
 |
HandCare
| Distale
| Assistée
| Visuelle
| 5
| Mouvements d’ouverture et de fermeture lors d’exercices dirigés.
| Terminal d’interaction robotisé
|
HapticKnob
| Distale
| Assistée, résistive
| Interactive et par intuition visuelle.
| 2
| Coordination de la préhension avec pronation/supination de l’avant-bras.
| Terminal d’interaction robotisé
http://www.sciencedirect.com/science/article/pii/S0924424710000154
 |
HWARD
| Distale
| Assistée, active assistée.
| Visuelle et auditive.
| 3
| Mouvements de prises et de relâchements dans un environnement de réalité virtuel (RV).
| Actionné par pneumatique
|
L-EXOS
| Proximale
| Active assistée.
| Par retour de force, visuelle, indices auditifs durant la tâches.
| 5
| Exercices d’atteinte suivant une trajectoire prédéfinie ou lors de mouvements libres dans un environnement de RV.
| Exosquelette
|
MEMOS
| Proximale
| Active, passive, active-assistée, résistive.
| Visuelle sur la position de poignée par rapport à la position prévue.
| N/A
| Exercices du coude et de l’épaule dans une séquence de mouvements d’atteinte point par point dans un plan horizontal.
| Actionné, terminal d’interaction robotisé.
|
MIME
| Proximale
| Passive, active –assistée, active-contrainte, mode bilatéral.
| Suivi et motivation sur la fraction du mouvement complété ou sur le temps requis pour le compléter.
| 6
| Mouvement unilatéral ou bilatéral de l’épaule et du coude lors d’activités d’atteinte de cibles.
| Exosquelette
http://www.rehab.research.va.gov/jour/06/43/5/lum.html
 |
MIT-Manus
| Proximale
| Assistée
| Visuelle, auditive, et tactile
| 2
| Mouvements de l’épaule et du coude dans un plan horizontal, exercices d’atteinte répétitifs.
| Exosquelette
http://www.techshout.com/science/2010/17/mit-manus-robot-assisted-therapy-may-help-stroke-patients-regain-function/
 |
Proximale et distale
| Assistée, résistive, passive.
|
| 3
| Abduction/adduction, flexion/extension, pronation/supination, mouvements verticaux, exercices de préhension.
| Exosquelette
| |
NeReBot
| Proximale
| Assistée.
| Visuelle et auditive.
| 3
| Flexion et extension, pronation et supination, adduction et abduction, mouvements circulaires de l’épaule et du coude.
| Activé par câble direct, utilisation en position assise ou couchée.
http://www.mechatronics.it/index.php?lingua=ENG&pag=res&sub=att&id=16
 |
Pneumatic Glove
| Distale
| Assistée, assistance requise
| Tactile, visuelle.
| 5
| Tâches de préhension et de relâchement, extension des doigts dans un environnement de RV et avec de vrais objets.
| Exosquelette
|
RegoGo
| Proximale
| Passive, active, active assistée.
| Visuelle et auditive.
| N/A
| Objectifs d’atteinte sur l’écran de l’ordinateur en utilisant les articulations du coude et de l’épaule, dans les 3 dimensions et sous tous les plans.
| Terminal d’interaction robotisé
|
REHAROB Therapeutic System
| Proximale
| Assistance passive
| N/A
| N/A
| Physiothérapie de l’épaule et du coude, réalisation d’exercices lents à vitesse constante avec un nombre élevé de répétitions.
| Exosquelette
http://www.a1tech.hu/reharob_en.htm
 |
Robot-Assisted Individualized Finger Rehabilitation
| Distale
| Assistance passive complète.
| N/A
| N/A
| Entraînement de la préhension et du relâchement simulé, activités de loisir dans un environnement de RV.
| Terminal d’interaction robotisé
|
T-WREX
| Proximale et distale
| Passive (non-robotisée) orthèse offrant un soutien au bras contre la gravité
| Visuelle et auditive, objective sur la performance de la tâche à la fin de chaque partie.
| 5
| Exercices fonctionnels en 3D/environnement de RV, répétitif.
| Exosquelette
http://www.ric.org/research/centers/mars3/archives/mars-rerc/twrexdesc/
 |
Pneu-WREX
| Proximale
| Assistance au besoin
| Visuelle et auditive
| 4
| Flexion/extension du coude, abduction/adduction de l’épaule horizontalement, flexion/extension de l’épaule, et mouvements avant/arrière, tâches fonctionnelles en 3D
| Exosquelette
http://www.readcube.com/articles/10.1186/1743-0003-6-20
 |
Information aux cliniciens
Note : En passant en revue les résultats dans le tableau synoptique, il est important de noter qu’ils sont toujours faits selon les critères d’essais cliniques randomisés (ECR) – spécifiquement comparés à un groupe témoin. Pour clarifier, les individus recevant le traitement peuvent s’être améliorés comparativement à leur état avant ce traitement MAIS ne se sont pas améliorés sensiblement plus que ceux du groupe témoin (lorsque les deux groupes ont été comparés au moment de l’évaluation post-traitement). La conclusion que vous verrez alors est que le traitement n’est pas efficace voulant dire « plus efficace » que le traitement témoin auquel il a été comparé. Les études non randomisées ne sont plus incluses lorsqu’il y a suffisamment d’évidences de recherche indiquant de fortes données probantes (niveau 1a).
Quarante-sept études ont été révisées dans ce module (16 ECR de haute qualité, quatre ECR de qualité acceptable, un ECR de faible qualité et 26 études non-randomisées) ; ces études ont principalement examiné la rééducation du membre supérieur (MS) assistée par robot. Cette rééducation inclue typiquement la pratique répétitive de tâches fonctionnelles dirigées qui sollicitent différents groupes musculaires du MS, de l’épaule, du coude, du poignet et des doigts. Habituellement, la rééducation du MS assistée par robot varie de dix à soixante minutes par séance, pratiquée de trois à cinq fois par semaine, sur une période allant de quatre à onze semaines. Les groupes témoins incluent la rééducation habituelle du MS, des interventions simulées par robot assisté, la thérapie avec attelle de soutien (sling suspension), la thérapie neuro-développementale, la thérapie sans assistance par tâches appariées, ou aucune intervention de réadaptation du membre affecté.
Une récente Revue Cochrane (Mehrholz et al., 2012), qui comprenait 19 ECR ou essais cliniques contrôlés (13 d’entre eux ont été examinés et inclus dans ce module Info-AVC), indique des différences statistiquement significatives en faveur de la rééducation du MS assistée par robot comparée aux interventions témoins pour les activités de la vie quotidienne et la fonction du bras, mais pas pour la force musculaire. Les auteurs précisent que ces résultats doivent par contre être interprétés avec précaution considérant la variabilité de la durée de rééducation, des différents types d’intervention et des diverses caractéristiques spécifiques des patients. En fait, une récente Revue systématique (Norouzi-Geidari et al., 2012), qui comprenait 12 ECR (tous examinés et inclus dans ce module de même que dans la Revue de Mehrholz et al., 2012), n’indique aucune différence significative entre la rééducation du MS assistée par robot et les interventions habituelles au niveau de la récupération motrice, des activités de la vie quotidienne, de la force et du contrôle moteur, lorsque la durée et l’intensité des deux interventions sont appariés. Pour dresser un tableau clair de l’efficacité de la rééducation du MS assistée par robot, comparée aux interventions habituelles de réadaptation, ce module Info-AVC a inclus des études dans lesquelles la rééducation du MS assistée par robot est comparée avec des interventions habituelles de réadaptation ayant la même intensité (ou aucune intervention). Subséquemment, les études qui comparaient la rééducation du MS assistée par robot avec la stimulation électrique fonctionnelle ou la stimulation neuromusculaire n’ont pas été incluses dans le module pour l’instant. En outre, considérant les nombreuses diversités quant à la durée/intensité des interventions, des différents types de dispositifs et d’exercices utilisées, ce module présente des résultats spécifiques pour chaque dispositif ou système robotisé examiné. Dans l’ensemble, les différents types de dispositif ou système robotisé utilisés dans la rééducation du MS se sont avérés efficaces pour améliorer les résultats des diverses mesures du MS selon le continuum des phases de récupération suivant un AVC. En phase aiguë de récupération post-AVC, le système NeReBot s’est avéré plus efficace qu’une intervention comparative pour améliorer l’indépendance fonctionnelle et la fonction du MS. En phase subaiguë de récupération, le dispositif MIME s’est avéré plus efficace qu’une intervention comparative pour améliorer la fonction du MS. En phase chronique de récupération, le système BATRAC s’est avéré plus efficace qu’une intervention comparative pour améliorer l’amplitude articulaire et la fonction du MS ; le système Bi-Manu-Track, plus efficace qu’une intervention comparative pour améliorer la fonction et l’activité motrice du MS ; le dispositif GENTLE/S, plus efficace qu’une intervention comparative pour améliorer la fonction du MS, et le MIME, plus efficace qu’une intervention comparative pour améliorer la cinématique, la force et la fonction du MS. D’autres dispositifs ou systèmes robotisés utilisés en phase chronique de récupération post-AVC, se sont avérés être directement associés à des améliorations significatives sur des mesures du MS bien que leur efficacité, comparée à un groupe témoin ou à une intervention comparative, n’ait pas encore été démontrée.
Note : Le terme “membre supérieur” et son acronyme “MS” sont utilisés de façon interchangeable tout au long de ce module.
Tableau des résultats
Pour visualiser le tableau des résultats par auteurs (anglais seulement)
Résultats
Phase aiguë - NeReBot
Contrôle du tronc
Inefficace
1b
Un ECR de haute qualité (Masiero et al., 2007) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif NeReBot sur le contrôle du tronc de patients en phase aiguë de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients pour recevoir une rééducation du MS utilisant le système NeReBot ou une exposition limitée au dispositif dans laquelle les patients utilisaient le système NeReBot avec leur bras moins affecté. La rééducation assistée consiste en une série d’exercices qui simulait les mouvements du coude et de l’épaule parétiques. À 5 semaines, après l’intervention, de même qu’à 3 et 8 mois de suivi, aucune différence significative entre les groupes n’a été notée sur le contrôle du tronc tel que mesuré par le Trunk Control Test.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation du MS utilisant le système NeReBot n’est pas plus efficace qu’une intervention comparative (ici, une exposition limitée au dispositif avec la bras moins affecté) pour améliorer le contrôle du tronc de patients en phase aiguë de récupération post-AVC.
Un ECR de haute qualité (Masiero et al., 2011) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif NeReBot sur la dextérité de patients en phase aiguë de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients pour recevoir une rééducation du MS utilisant le système NeReBot ou la réadaptation habituelle. Cette rééducation assistée ciblait les mouvements du coude et de l’épaule parétiques en simulant une thérapie avec la main sur la main. À 5 semaines, après l’intervention et à 3 mois de suivi, aucune différence significative entre les groupes n’a été notée sur la dextérité telle que mesurée par le Box and Block Test.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation du MS utilisant le système NeReBot n’est pas plus efficace que la réadaptation habituelle pour améliorer la dextérité de patients en phase aiguë de récupération post-AVC.
Un ECR de haute qualité (Rosati et al., 2007) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif NeReBot sur la douleur de patients en phase aiguë de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients pour recevoir une rééducation du MS utilisant le système NeReBot ou une exposition limitée au dispositif dans laquelle les patients utilisaient le système NeReBot avec leur bras moins affecté. La rééducation assistée consiste en une série d’exercices qui simulait les mouvements du coude et de l’épaule parétiques. À 3 mois post-AVC, aucune différence significative entre les groupes n’a été notée sur la douleur telle qu’évaluée par une Échelle visuelle analogue.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation du MS utilisant le système NeReBot n’est pas plus efficace qu’une intervention comparative (ici, une exposition limitée au dispositif avec la bras moins affecté) pour améliorer la douleur de patients en phase aiguë de récupération post-AVC.
Trois ECR de haute qualité (Masiero et al, 2007; Rosati et al., 2007 et Masiero et al., 2011) ont examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif NeReBot sur la fonction du MS de patients en phase aiguë de récupération post-AVC.
Le premier ECR de haute qualité (Masiero et al, 2007) a assigné aléatoirement les patients pour recevoir une rééducation du MS utilisant le système NeReBot ou une exposition limitée au dispositif dans laquelle les patients utilisaient le système NeReBot avec leur bras non affecté. La rééducation assistée consiste en une série d’exercices qui simulait les mouvements du coude et de l’épaule parétiques. À 5 semaines, après l’intervention, de même qu’à 3 et 8 mois, au moment de suivis, une différence significative entre les groupes a été relevée sur la fonction du MS (telle que mesurée par la Fugl-Meyer Assessment of Upper Extremity, sous-échelles épaule/coude et coordination), en faveur du groupe de rééducation du MS utilisant le système NeReBot comparé à l’exposition limitée au dispositif.
Note : Cependant, aucune différence significative entre les groupes n’a été notée au niveau du résultat du Fugl-Meyer Assessment of Upper Extremity, sous-échelle poignet/main, à aucun des temps de mesure.
Le second ECR de haute qualité (Rosati et al., 2007) a assigné aléatoirement les patients pour recevoir une rééducation du MS utilisant le système NeReBot ou une exposition limitée au dispositif dans laquelle les patients utilisaient le système NeReBot avec leur bras moins affecté. La rééducation assistée consiste en une série d’exercices qui simulait les mouvements du coude et de l’épaule parétiques. À 3 mois post-AVC, une différence significative entre les groupes a été relevée sur la fonction du MS (telle que mesurée par la Fugl-Meyer Assessment of Upper Extremity, sous-échelles épaule/coude et coordination, et la Motor Status Scale, sous-échelle épaule/coude), en faveur du groupe de rééducation du MS utilisant le système NeReBot comparé à l’exposition limitée au dispositif.
Note : Cependant, à 3 mois post-AVC, aucune différence significative entre les groupes n’a été notée au niveau du résultat de la Fugl-Meyer Assessment of Upper Extremity, sous-échelle poignet/main, et de la Motor Status Scale, sous-échelle poignet/main.
Le troisième ECR de haute qualité (Masiero et al., 2011) a assigné aléatoirement les patients pour recevoir une rééducation du MS utilisant le système NeReBot ou la réadaptation habituelle. Cette rééducation assistée ciblait les mouvements du coude et de l’épaule parétiques en simulant une thérapie avec la main sur la main. À 5 semaines, après l’intervention, et à 3 mois de suivi, aucune différence significative entre les groupes n’a été notée sur la fonction du MS (telle que mesurée par le Frenchay Arm Test, la Fugl-Meyer Assessment of Upper Extremity Function, score total et au niveau des résultats aux sous-échelles épaule/coude, coordination et poignet/main).
Conclusion : De fortes données probantes (niveau 1a), provenant de deux ECR de haute qualité, indiquent que la rééducation du MS assistée par robot utilisant le dispositif NeReBot est plus efficace qu’une intervention comparative (ici, une exposition limitée au dispositif avec la bras moins affecté) pour améliorer la fonction proximale du MS (mais non la fonction distale) de patients en phase aiguë de récupération post-AVC.
Note : Cependant, un troisième ECR de haute qualité n’a noté aucune différence significative entre les groupes entre la rééducation du MS assistée par robot et la réadaptation habituelle.
Trois ECR de haute qualité (Masiero et al, 2007; Rosati et al., 2007 et Masiero et al., 2011) ont examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif NeReBot sur la force musculaire du MS de patients en phase aiguë de récupération post-AVC.
Le premier ECR de haute qualité (Masiero et al, 2007) a assigné aléatoirement les patients pour recevoir une rééducation du MS utilisant le système NeReBot ou une exposition limitée au dispositif dans laquelle les patients utilisaient le système NeReBot avec leur bras moins affecté. La rééducation assistée consiste en une série d’exercices qui simulait les mouvements du coude et de l’épaule parétiques. À 5 semaines, après l’intervention, de même qu’à 3 et 8 mois, au moment de suivis, une différence significative entre les groupes a été relevée sur la force du deltoïde (telle que mesurée par la sous-échelle Force motrice du Medical Research Council – MRC), et sur la force du biceps (à 5 semaines après l’intervention et à 3 mois de suivi seulement), en faveur du groupe de rééducation du MS utilisant le système NeReBot comparé à l’exposition limitée au dispositif.
Note : Aucune différence significative entre les groupes n’a été notée au niveau du résultat du fléchisseur du poignet (MRC), à aucun des temps de mesure.
Le second ECR de haute qualité (Rosati et al., 2007) a assigné aléatoirement les patients pour recevoir une rééducation du MS utilisant le système NeReBot ou une exposition limitée au dispositif dans laquelle les patients utilisaient le système NeReBot avec leur bras moins affecté. La rééducation assistée consiste en une série d’exercices qui simulait les mouvements du coude et de l’épaule parétiques. À 3 mois post-AVC, une différence significative entre les groupes a été relevée sur la force musculaire de l’épaule flexion/abduction et du coude flexion/extension (telle que mesurée par la sous-échelle Force motrice du MRC), en faveur du groupe de rééducation du MS utilisant le système NeReBot comparé à l’exposition limitée au dispositif.
Note : À 3 mois post-AVC, aucune différence significative entre les groupes n’a été notée au niveau des résultats du poignet flexion/extension (MRC).
Le troisième ECR de haute qualité (Masiero et al., 2011) a assigné aléatoirement les patients pour recevoir une rééducation du MS utilisant le système NeReBot ou la réadaptation habituelle. Cette rééducation assistée ciblait les mouvements du coude et de l’épaule parétiques en simulant une thérapie avec la main sur la main. À 5 semaines, après l’intervention, et à 3 mois, au moment d’un suivi, aucune différence significative entre les groupes n’a été notée sur la plupart des mesures de la force musculaire du MS (telle que mesurée par le MRC pour la force motrice, et aux résultats pour le deltoïde, biceps, triceps et extenseurs du poignet).
Note : Cependant, à 5 semaines, après l’intervention seulement, une différence significative entre les groupes a été relevée au niveau du résultat du fléchisseur du poignet (MRC), en faveur de la réadaptation habituelle comparée à la rééducation du MS assistée par robot.
Conclusion : De fortes données probantes (niveau 1a), provenant de deux ECR de haute qualité, indiquent que la rééducation du MS assistée par robot utilisant le dispositif NeReBot est plus efficace qu’une intervention comparative (ici, une exposition limitée au dispositif avec la bras moins affecté) pour améliorer la force musculaire de l’épaule et du coude de patients en phase aiguë de récupération post-AVC.
Note : Cependant, un troisième ECR de haute qualité n’a noté aucune différence significative entre les groupes entre la rééducation du MS assistée par robot et la réadaptation habituelle.
Indépendance fonctionnelle
Efficace
1a
Trois ECR de haute qualité (Masiero et al, 2007; Rosati et al., 2007 et Masiero et al., 2011) ont examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif NeReBot sur l’indépendance fonctionnelle de patients en phase aiguë de récupération post-AVC.
Le premier ECR de haute qualité (Masiero et al, 2007) a assigné aléatoirement les patients pour recevoir une rééducation du MS utilisant le système NeReBot ou une exposition limitée au dispositif dans laquelle les patients utilisaient le système NeReBot avec leur bras non affecté. La rééducation assistée consiste en une série d’exercices qui simulait les mouvements du coude et de l’épaule parétiques. À 5 semaines, après l’intervention, de même qu’à 3 et 8 mois de suivi, une différence significative entre les groupes a été notée sur l’indépendance fonctionnelle (telle que mesurée par le score total et la sous-échelle Motricité de la Mesure de l’Indépendance Fonctionnelle – MIF), en faveur du groupe de rééducation du MS utilisant le système NeReBot comparé à l’exposition limitée au dispositif.
Le second ECR de haute qualité (Rosati et al., 2007) a assigné aléatoirement les patients pour recevoir une rééducation du MS utilisant le système NeReBot ou une exposition limitée au dispositif dans laquelle les patients utilisaient le système NeReBot avec leur bras moins affecté. La rééducation assistée consiste en une série d’exercices qui simulait les mouvements du coude et de l’épaule parétiques. À 3 mois post-AVC, une différence significative entre les groupes a été relevée sur l’indépendance fonctionnelle (telle que mesurée par le score total et la sous-échelle Motricité de la MIF), en faveur du groupe de rééducation du MS utilisant le système NeReBot comparé à l’exposition limitée au dispositif.
Le troisième ECR de haute qualité (Masiero et al., 2011) a assigné aléatoirement les patients pour recevoir une rééducation du MS utilisant le système NeReBot ou la réadaptation habituelle. Cette rééducation assistée ciblait les mouvements du coude et de l’épaule parétiques en simulant une thérapie avec la main sur la main. À 5 semaines, après l’intervention, et à 3 mois, au moment de suivi, aucune différence significative entre les groupes n’a été notée sur l’indépendance fonctionnelle (telle que mesurée par le score total et la sous-échelle Motricité de la MIF).
Conclusion : De fortes données probantes (niveau 1a), provenant de deux ECR de haute qualité, indiquent que la rééducation du MS assistée par robot utilisant le dispositif NeReBot est plus efficace qu’une intervention comparative (ici, une exposition limitée au dispositif avec la bras moins affecté) pour améliorer l’indépendance fonctionnelle de patients en phase aiguë de récupération post-AVC.
Note : Cependant, un troisième ECR de haute qualité n’a noté aucune différence significative entre les groupes entre la rééducation du MS assistée par robot et la réadaptation habituelle.
Deux ECR de haute qualité (Masiero et al., 2007 et Masiero et al., 2011) ont examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif NeReBot sur la spasticité du MS de patients en phase aiguë d’un AVC.
Le premier ECR de haute qualité (Masiero et al., 2007) a assigné aléatoirement les patients pour recevoir une rééducation du MS utilisant le système NeReBot ou une exposition limitée au dispositif dans laquelle les patients utilisaient le système NeReBot avec leur bras moins affecté. La rééducation assistée consiste en une série d’exercices qui simulait les mouvements du coude et de l’épaule parétiques. À 5 semaines, après l’intervention, de même qu’à 3 et 8 mois, au moment de suivis, aucune différence significative entre les groupes n’a été notée sur la spasticité du MS telle que mesurée par la Modified Ashworth Scale.
Le second ECR de haute qualité (Masiero et al., 2011) a assigné aléatoirement les patients pour recevoir une rééducation du MS utilisant le système NeReBot ou la réadaptation habituelle. Cette rééducation assistée ciblait les mouvements du coude et de l’épaule parétiques en simulant une thérapie avec la main sur la main. À 5 semaines, après l’intervention, et à 3 mois, au moment d’un suivi, aucune différence significative entre les groupes n’a été notée sur la spasticité du MS telle que mesurée par la Modified Ashworth Scale.
Conclusion : De fortes données probantes (niveau 1a), provenant de deux ECR de haute qualité, indiquent que la rééducation du MS assistée par robot utilisant le dispositif NeReBot n’est pas plus efficace qu’une intervention comparative (ici, une exposition limitée au dispositif avec la bras moins affecté) pour réduire la spasticité du MS de patients en phase aiguë de récupération post-AVC.
Phase aiguë - MIT-Manus
Un ECR de haute qualité (Rabadi et al., 2008) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif MIT-Manus pour réduire la douleur au MS de patients en phase aiguë de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients pour recevoir une rééducation du MS utilisant le système MIT-Manus, une rééducation du MS utilisant le bras ergométrique Monark (cycle à main bidirectionnel), ou l’ergothérapie habituelle. La rééducation assistée consiste en une série d’exercices dirigés, passifs et actifs, de mouvements du coude et de l’épaule parétiques. Après 12 séances d’intervention, aucune différence significative entre les groupes n’a été notée sur la douleur au MS telle qu’évaluée par la sous-échelle Douleur de la Fugl-Meyer Assessment of the Upper Extremity.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation du MS utilisant le système MIT-Manus n’est pas plus efficace qu’une intervention comparative (ici, l’ergométrie du MS, l’ergothérapie habituelle ou une rééducation simulée du MS assistée par robot) pour réduire la douleur au MS de patients en phase aiguë de récupération post-AVC.
Fonction du MS
Inefficace
1a
Deux ECR de haute qualité, le premier de Volpe et al., 2000, (et une étude rétrospective de cet ECR par Fasoli et al., 2004), le second de Rabadi et al., 2008, et une étude quasi-expérimentale (Aisen et al., 1997, de même qu’un suivi de cette étude par Volpe et al., 1999), ont examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif MIT-Manus sur la fonction du MS de patients en phase aiguë de récupération post-AVC.
Le premier ECR de haute qualité (Volpe et al., 2000) a assigné aléatoirement les patients pour recevoir une rééducation du MS utilisant le système MIT-Manus ou une exposition limitée au dispositif. La rééducation assistée consiste en une série d’exercices dirigés, passifs et actifs, de mouvements du coude et de l’épaule parétiques. Après 7 semaines d’intervention, aucune différence significative entre les groupes n’a été notée sur la fonction du MS (telle que mesurée par les sous-échelles épaule/coude et poignet/main de la Fugl-Meyer Assessment of Upper Extremity, de même que par la sous-échelle poignet/main de la Motor Status Scale).
Note : Cependant une différence significative entre les groupes a été relevée au niveau des sous-échelles épaule/coude et coordination de la Motor Status Scale, en faveur du groupe de rééducation du MS assistée par robot comparé à l’exposition limitée au dispositif.
De plus, une étude rétrospective de cet ECR par Fasoli et al., 2004, a relevé une interaction significative entre les groupes et le temps sur la fonction du MS des patients (Fugl-Meyer Assessment of Upper Extremity et sous-échelle épaule/coude de la Motor Status Scale) de la période intermédiaire aux évaluations au moment du congé, en faveur du groupe de rééducation du MS assistée par robot.
Note : Toujours lors de la période intermédiaire aux évaluations au moment du congé, aucune différence significative entre les groupes n’a été notée sur la sous-échelle poignet/main de la Motor Status Scale.
Le second ECR de haute qualité (Rabadi et al., 2008) a assigné aléatoirement les patients pour recevoir une rééducation du MS utilisant le système MIT-Manus, une rééducation du MS utilisant le bras ergométrique Monark (cycle à main bidirectionnel), ou l’ergothérapie habituelle. La rééducation assistée consiste en une série d’exercices dirigés, passifs et actifs, de mouvements du coude et de l’épaule parétiques. Après 12 séances d’intervention, aucune différence significative entre les groupes n’a été notée sur la fonction du MS (telle que mesurée par les sous-échelles épaule/coude et poignet/main de la Fugl-Meyer Assessment of Upper Extremity, par les sous-échelles épaule/coude et poignet/main de la Motor Status Scale, de même que par l’Action Research Arm Test).
L’étude quasi-expérimentale (Aisen et al., 1997) a assigné les patients pour recevoir une rééducation du MS utilisant le système MIT-Manus ou une rééducation simulée du MS assistée par robot. La rééducation assistée consiste en une série d’exercices dirigés, passifs et actifs, de mouvements du coude et de l’épaule parétiques. À 9 semaines, après l’intervention, aucune différence significative entre les groupes n’a été notée sur la fonction du MS telle que mesurée par la Fugl-Meyer Assessment of Upper Extremity et par le score proximal et distal de la Motor Status Scale.
Le suivi de l’étude d’Aisen et al. (1997) par Volpe et al. (1999) n’a noté, à 3 ans post-AVC, aucune différence significative entre les groupes sur la plupart des mesures de la fonction du MS (telle que mesurée par les sous-échelles épaule/coude, coordination, et poignet/main de la Fugl-Meyer Assessment of Upper Extremity de même que par la sous-échelle poignet/main de la Motor Status Scale).
Note : Cependant une différence significative entre les groupes a été relevée au niveau de la sous-échelle épaule/coude de la Motor Status Scale, en faveur du groupe de rééducation du MS assistée par robot comparé à la rééducation simulée du MS assistée par robot.
Conclusion : De fortes données probantes (niveau 1a), provenant de deux ECR de haute qualité, indiquent que la rééducation du MS assistée par robot utilisant le dispositif MIT-Manus n’est pas plus efficace qu’une intervention comparative (ici, l’ergométrie du MS, l’ergothérapie habituelle ou une rééducation simulée du MS assistée par robot) pour améliorer la fonction du MS de patients en phase aiguë de récupération post-AVC.
Deux ECR de haute qualité, le premier de Volpe et al., 2000, et une étude rétrospective de cet ECR par Fasoli et al., 2004, le second de Rabadi et al., 2008, et une étude quasi-expérimentale (Aisen et al., 1997, de même qu’un suivi de cette étude par Volpe et al., 1999, ont examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif MIT-Manus sur la force du MS de patients en phase aiguë de récupération post-AVC.
Le premier ECR de haute qualité (Volpe et al., 2000) a assigné aléatoirement les patients pour recevoir une rééducation du MS utilisant le système MIT-Manus ou une exposition limitée au dispositif. La rééducation assistée consiste en une série d’exercices dirigés, passifs et actifs, de mouvements du coude et de l’épaule parétiques. Après 6 à 7 semaines d’intervention, une différence significative entre les groupes a été relevée sur la force du MS (telle que mesurée par la sous-échelle Force motrice du Medical Research Council – MRC), en faveur du groupe de rééducation du MS assistée par robot comparé à l’exposition limitée au dispositif.
De plus, une étude rétrospective de cet ECR par Fasoli et al., 2004, a relevé une différence significative entre les groupes, de la période intermédiaire aux évaluations au moment du congé, sur la force du MS des patients, mesurée par la sous-échelle Force motrice du MRC, toujours en faveur du groupe de rééducation du MS assistée par robot.
Le second ECR de haute qualité (Rabadi et al., 2008) a assigné aléatoirement les patients pour recevoir une rééducation du MS utilisant le système MIT-Manus, une rééducation du MS utilisant le bras ergométrique Monark (cycle à main bidirectionnel), ou l’ergothérapie habituelle. La rééducation assistée consiste en une série d’exercices dirigés, passifs et actifs, de mouvements du coude et de l’épaule parétiques. Après 12 séances d’intervention, aucune différence significative entre les groupes n’a été notée sur la force du MS (telle que mesurée par la sous-échelle Force motrice du MRC).
L’étude quasi-expérimentale (Aisen et al., 1997) a assigné les patients pour recevoir une rééducation du MS utilisant le système MIT-Manus ou une rééducation simulée du MS assistée par robot. La rééducation assistée consiste en une série d’exercices dirigés, passifs et actifs, de mouvements du coude et de l’épaule parétiques. À 9 semaines, après l’intervention, aucune différence significative entre les groupes n’a été notée sur la force du MS mesurée par une échelle à 5 points évaluant la force motrice.
Le suivi de l’étude d’Aisen et al. (1997) par Volpe et al. (1999) n’a noté, à 3 ans post-AVC, aucune différence significative entre les groupes sur la force du MS des patients, évaluée par la même échelle que dans l’étude principale.
Conclusion : Des données probantes contradictoires (niveau 4) ont été relevées au sujet de l’effet de la rééducation du MS assistée par robot utilisant le dispositif MIT-Manus pour améliorer la force du MS de patients en phase aiguë re récupération post-AVC. Tandis qu’un premier ECR de haute qualité indique que la rééducation du MS assistée par robot utilisant le système MIT-Manus est plus efficace qu’une exposition limitée au dispositif ; un second ECR de haute qualité et une étude quasi-expérimentale ont indiqué que la rééducation du MS assistée par robot n’est pas plus efficace qu’une intervention comparative (ici, l’ergométrie du MS, l’ergothérapie habituelle ou une rééducation simulée du MS assistée par robot) pour améliorer la force du MS de patients en phase aiguë re récupération post-AVC.
Indépendance fonctionnelle
Contradictoire
4
Deux ECR de haute qualité (Volpe et al., 2000 et Rabadi et al., 2008) et une étude quasi-expérimentale (Aisen et al., 1997, de même qu’un suivi de cette étude par Volpe et al., 1999) ont examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif MIT-Manus sur l’indépendance fonctionnelle de patients en phase aiguë de récupération post-AVC.
Le premier ECR de haute qualité (Volpe et al., 2000) a assigné aléatoirement les patients pour recevoir une rééducation du MS utilisant le système MIT-Manus ou une exposition limitée au dispositif. La rééducation assistée consiste en une série d’exercices dirigés, passifs et actifs, de mouvements du coude et de l’épaule parétiques. Après 6 à 7 semaines d’intervention, une différence significative entre les groupes a été relevée sur l’indépendance fonctionnelle telle qu’évaluée par les sous-échelles Motricité et Cognition de la Mesure de l’indépendance fonctionnelle (MIF), en faveur de la rééducation du MS assistée par robot comparée à l’intervention témoin.
Le second ECR de haute qualité (Rabadi et al., 2008) a assigné aléatoirement les patients pour recevoir une rééducation du MS utilisant le système MIT-Manus, une rééducation du MS utilisant le bras ergométrique Monark (cycle à main bidirectionnel), ou l’ergothérapie habituelle. La rééducation assistée consiste en une série d’exercices dirigés, passifs et actifs, de mouvements du coude et de l’épaule parétiques. Après 12 séances d’intervention, aucune différence significative entre les groupes n’a été notée sur l’indépendance fonctionnelle telle qu’évaluée par le score total, et les sous-échelles Motricité et Cognition de la MIF.
L’étude quasi-expérimentale (Aisen et al., 1997) a assigné les patients pour recevoir une rééducation du MS utilisant le système MIT-Manus ou une rééducation simulée du MS assistée par robot. La rééducation assistée consiste en une série d’exercices dirigés, passifs et actifs, de mouvements du coude et de l’épaule parétiques. À 9 semaines, après l’intervention, aucune différence significative entre les groupes n’a été notée sur l’indépendance fonctionnelle telle qu’évaluée par la MIF.
Le suivi de l’étude d’Aisen et al. (1997) par Volpe et al. (1999) n’a noté, à 3 ans post-AVC, aucune différence significative entre les groupes sur l’indépendance fonctionnelle des patients telle qu’évaluée par la MIF.
Conclusion : Des données probantes contradictoires (niveau 4) ont été relevées au sujet de l’effet de la rééducation du MS assistée par robot utilisant le dispositif MIT-Manus pour améliorer l’indépendance fonctionnelle de patients en phase aiguë de récupération post-AVC. Tandis qu’un premier ECR de haute qualité indique que la rééducation du MS assistée par robot utilisant le système MIT-Manus est plus efficace qu’une exposition limitée au dispositif ; un second ECR de haute qualité et une étude quasi-expérimentale ont indiqué que la rééducation du MS assistée par robot n’est pas plus efficace qu’une intervention comparative (ici, l’ergométrie du MS, l’ergothérapie habituelle ou une rééducation simulée du MS assistée par robot) pour améliorer l’indépendance fonctionnelle de patients en phase aiguë de récupération post-AVC..
Un ECR de haute qualité (Rabadi et al., 2008) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif MIT-Manus pour réduire la spasticité du MS de patients en phase aiguë de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients pour recevoir une rééducation du MS utilisant le système MIT-Manus, une rééducation du MS utilisant le bras ergométrique Monark (cycle à main bidirectionnel), ou l’ergothérapie habituelle. La rééducation assistée consiste en une série d’exercices dirigés, passifs et actifs, de mouvements du coude et de l’épaule parétiques. Après 12 séances d’intervention, aucune différence significative entre les groupes n’a été notée sur la spasticité du MS telle que mesurée par la Modified Ashworth Scale.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation du MS utilisant le système MIT-Manus n’est pas plus efficace qu’une intervention comparative (ici, l’ergométrie du MS, l’ergothérapie habituelle ou une rééducation simulée du MS assistée par robot) pour réduire la spasticité du MS de patients en phase aiguë de récupération post-AVC.
Phase subaiguë - MIME
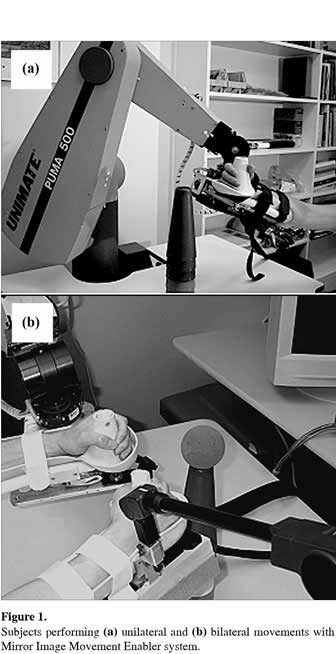
Un ECR de qualité acceptable (Lum et al., 2006) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif MIME (Mirror Image Movement Enabler) sur la fonction du MS de patients en phase subaiguë de récupération post-AVC. Cet ECR de qualité acceptable a assigné aléatoirement les patients pour recevoir une rééducation unilatérale et/ou bilatérale du MS assistée par robot utilisant le dispositif MIME, ou la réadaptation habituelle. La rééducation assistée consiste en une série d’exercices dirigés du mouvement d’atteindre par le coude et l’épaule parétiques. Après 4 semaines d’intervention, une différence significative entre les groupes a été relevée sur la fonction du MS telle que mesurée par la sous-échelle épaule/coude de la Fugl-Meyer Assessment of Upper Extremity et par le score synergique de la Motor Status Scale, en faveur de la rééducation assistée par robot combinée unilatérale/bilatérale comparée à la réadaptation habituelle. Au même temps de mesure, aucune différence significative entre les groupes n’a été notée pour la sous-échelle poignet/main de la Fugl-Meyer Assessment of Upper Extremity. Au suivi de 6 mois, une différence significative entre les groupes a été relevée sur la fonction du MS telle que mesurée par la sous-échelle poignet/main de la Fugl-Meyer Assessment of Upper Extremity, en faveur de la rééducation unilatérale assistée par robot comparée à la rééducation combinée unilatérale/bilatérale. Au même temps de mesure, aucune différence significative entre les groupes n’a été notée sur les autres évaluations de la fonction du MS, tant au niveau de la sous-échelle épaule/coude de la Fugl-Meyer Assessment of Upper Extremity qu’au score synergique de la Motor Status Scale.
Conclusion : Des données probantes limitées (niveau 2a), provenant d’un ECR de qualité acceptable, indiquent que la rééducation du MS utilisant le dispositif MIME est plus efficace que la réadaptation habituelle pour améliorer la fonction du MS de patients en phase subaiguë de récupération post-AVC.
Note : Les différences significatives entre les groupes ne concernent uniquement que la rééducation assistée par robot combinée unilatérale/bilatérale, comparée à la réadaptation habituelle, immédiatement après l’intervention.
Un ECR de qualité acceptable (Lum et al., 2006) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif MIME (Mirror Image Movement Enabler) sur la force du MS de patients en phase subaiguë de récupération post-AVC. Cet ECR de qualité acceptable a assigné aléatoirement les patients pour recevoir une rééducation unilatérale, bilatérale, ou une combinaison unilatérale et bilatérale du MS assistée par robot utilisant le dispositif MIME, ou la réadaptation habituelle. La rééducation assistée consiste en une série d’exercices dirigés du mouvement d’atteindre par le coude et l’épaule parétiques. Après 4 semaines d’intervention, ou au suivi de 6 mois, aucune différence significative entre les groupes n’a été notée sur la force du MS telle que mesurée par une échelle à 5 points évaluant la force motrice.
Conclusion : Des données probantes limitées (niveau 2a), provenant d’un ECR de qualité acceptable, indiquent que la rééducation unilatérale et/ou bilatérale du MS utilisant le dispositif MIME n’est pas plus efficace que la réadaptation habituelle pour améliorer la force du MS de patients en phase subaiguë de récupération post-AVC.
Indépendance fonctionnelle
Inefficace
2a
Un ECR de qualité acceptable (Lum et al., 2006) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif MIME (Mirror Image Movement Enabler) sur l’indépendance fonctionnelle de patients en phase subaiguë de récupération post-AVC. Cet ECR de qualité acceptable a assigné aléatoirement les patients pour recevoir une rééducation unilatérale, bilatérale, ou une combinaison unilatérale et bilatérale du MS assistée par robot utilisant le dispositif MIME, ou la réadaptation habituelle. La rééducation assistée consiste en une série d’exercices dirigés du mouvement d’atteindre par le coude et l’épaule parétiques. Après 4 semaines d’intervention, ou au suivi de 6 mois, aucune différence significative entre les groupes n’a été notée sur l’indépendance fonctionnelle telle qu’évaluée par les sous-échelles Soins personnels et Mobilité de la Mesure de l’indépendance fonctionnelle (MIF).
Conclusion : Des données probantes limitées (niveau 2a), provenant d’un ECR de qualité acceptable, indiquent que la rééducation unilatérale et/ou bilatérale du MS utilisant le dispositif MIME n’est pas plus efficace que la réadaptation habituelle pour améliorer l’indépendance fonctionnelle de patients en phase subaiguë de récupération post-AVC.
Un ECR de qualité acceptable (Lum et al., 2006) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif MIME (Mirror Image Movement Enabler) sur la spasticité du MS de patients en phase subaiguë de récupération post-AVC. Cet ECR de qualité acceptable a assigné aléatoirement les patients pour recevoir une rééducation unilatérale, bilatérale, ou une combinaison unilatérale et bilatérale du MS assistée par robot utilisant le dispositif MIME, ou la réadaptation habituelle. La rééducation assistée consiste en une série d’exercices dirigés du mouvement d’atteindre par le coude et l’épaule parétiques. Après 4 semaines d’intervention, ou au suivi de 6 mois, aucune différence significative entre les groupes n’a été notée sur la spasticité du MS telle que mesurée par le score proximal et distal de la Modified Ashworth Scale.
Conclusion : Des données probantes limitées (niveau 2a), provenant d’un ECR de qualité acceptable, indiquent que la rééducation unilatérale et/ou bilatérale du MS utilisant le dispositif MIME n’est pas plus efficace que la réadaptation habituelle pour réduire la spasticité du MS de patients en phase subaiguë de récupération post-AVC.
Phase chronique - Active Joint Brace for the Elbow
Une étude quasi-expérimentale (Stein et al., 2007) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif Active Joint Brace for the Elbow sur la fonction du MS de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant un exosquelette à orthèse robotisée contrôlée par EMG. La rééducation du MS assistée consiste en des tâches dirigées de la fonction du MS à l’aide d’une orthèse au coude. De 6 à 9 semaines après l’intervention, une amélioration significative a été relevée sur la fonction du MS telle que mesurée par la Fugl-Meyer Assessment of Upper Extremity Function.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS utilisant un exosquelette à orthèse robotisée contrôlée par EMG est efficace pour améliorer la fonction du MS de patients en phase chronique de récupération post-AVC.
Une étude quasi-expérimentale (Stein et al., 2007) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif Active Joint Brace for the Elbow sur la spasticité du MS de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant un exosquelette à orthèse robotisée contrôlée par EMG. La rééducation du MS assistée consiste en des tâches dirigées de la fonction du MS à l’aide d’une orthèse au coude. De 6 à 9 semaines après l’intervention, une amélioration significative a été relevée sur la spasticité du MS telle que mesurée par la Modified Ashworth Scale.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS utilisant un exosquelette à orthèse robotisée contrôlée par EMG est efficace pour réduire la spasticité du MS de patients en phase chronique de récupération post-AVC.
Phase chronique - ARM Guide
Amplitude articulaire
Inefficace
1b
Un ECR de haute qualité (Kahn et al., 2001) a examiné les effets de la rééducation du MS assistée par robot utilisant le système ARM Guide sur l’amplitude articulaire du MS de patients en phase chronique de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le système ARM Guide ou une rééducation non-robotisée par tâches appariées du mouvement d’atteindre. La rééducation assistée consiste en une série d’exercices dirigés du mouvement d’atteindre vers sept cibles. Après 8 semaines d’intervention, aucune différence significative entre les groupes n’a été notée sur l’amplitude articulaire active du MS.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation du MS utilisant le système ARM Guide n’est pas plus efficace qu’une intervention comparative (ici, une rééducation non-robotisée par tâches appariées du mouvement d’atteindre) pour améliorer l’amplitude articulaire du MS de patients en phase chronique de récupération post-AVC.
Un ECR de haute qualité (Kahn et al., 2001) et un ECR de qualité acceptable (Kahn et al., 2006) ont examiné les effets de la rééducation du MS assistée par robot utilisant le système ARM Guide sur la cinématique du MS de patients en phase chronique de récupération post-AVC.
L’ECR de haute qualité (Kahn et al., 2001) a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le système ARM Guide ou une rééducation non-robotisée par tâches appariées du mouvement d’atteindre. La rééducation assistée consiste en une série d’exercices dirigés du mouvement d’atteindre vers sept cibles. Après 8 semaines d’intervention, aucune différence significative entre les groupes n’a été notée sur la cinématique du MS (évaluée par le pic de vélocité durant le mouvement d’atteindre et par la résistance passive du mouvement).
L’ECR de qualité acceptable (Kahn et al., 2006) a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le système ARM Guide ou une rééducation non-robotisée par tâches appariées du mouvement d’atteindre. La rééducation assistée consiste en une série d’exercices actifs dirigés du mouvement d’atteindre vers cinq cibles. Après 8 semaines d’intervention, aucune différence significative entre les groupes n’a été notée sur la plupart des mesures de la cinématique du MS (la rigidité du MS, l’amplitude du mouvement d’atteindre soutenu activement et sans soutien, la vitesse et la rectitude du mouvement d’atteindre).
Note : Cependant, après l’intervention, une différence significative entre les groupes a été relevée sur la fluidité du mouvement d’atteindre, en faveur de la rééducation du MS assistée par robot comparée à la rééducation non-robotisée par tâches appariées du mouvement d’atteindre.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité et d’un ECR de qualité acceptable, indiquent que la rééducation du MS utilisant le système ARM Guide n’est pas plus efficace qu’une intervention comparative (ici, une rééducation non-robotisée par tâches appariées du mouvement d’atteindre) pour améliorer la cinématique du MS de patients en phase chronique de récupération post-AVC.
Fonction du MS
Inefficace
1b
Un ECR de haute qualité (Kahn et al., 2001) et un ECR de qualité acceptable (Kahn et al., 2006) ont examiné les effets de la rééducation du MS assistée par robot utilisant le système ARM Guide sur la fonction du MS de patients en phase chronique de récupération post-AVC.
L’ECR de haute qualité (Kahn et al., 2001) a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le système ARM Guide ou une rééducation non-robotisée par tâches appariées du mouvement d’atteindre. La rééducation assistée consiste en une série d’exercices dirigés du mouvement d’atteindre vers sept cibles. Après 8 semaines d’intervention, aucune différence significative entre les groupes n’a été notée sur la fonction du MS telle que mesurée par le Chedoke McMaster Test et le Rancho Los Amigos Functional Test of the Hemiparetic Upper Extremity.
L’ECR de qualité acceptable (Kahn et al., 2006) a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le système ARM Guide ou une rééducation non-robotisée par tâches appariées du mouvement d’atteindre. La rééducation assistée consiste en une série d’exercices actifs dirigés du mouvement d’atteindre vers cinq cibles. Après 8 semaines d’intervention, aucune différence significative entre les groupes n’a été notée sur la plupart des mesures de la fonction du MS telle que mesurée par le Chedoke McMaster Test et le Rancho Los Amigos Functional Test of the Hemiparetic Upper Extremity.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité et d’un ECR de qualité acceptable, indiquent que la rééducation du MS utilisant le système ARM Guide n’est pas plus efficace qu’une intervention comparative (ici, une rééducation non-robotisée par tâches appariées du mouvement d’atteindre) pour améliorer la fonction du MS de patients en phase chronique de récupération post-AVC.
Phase chronique - ARMin I / II
Amplitude articulaire
Efficace
2b
Une étude de cas unique (Nef et al., 2009) a examiné les effets de la rééducation du MS assistée par robot utilisant le système ARMin I sur l’amplitude articulaire du MS de patients en phase chronique de récupération post-AVC. Cette étude de cas unique a assigné trois patients à une rééducation du MS assistée par robot utilisant le système ARMin I. Cette rééducation assistée par robot consiste en une série d’exercices dirigés du mouvement d’atteindre de l’avant-bras et de l’épaule avec rétroaction auditive, visuelle et tactile. À 8 semaines, après l’intervention, et à 16 semaines, au moment d’un suivi, une amélioration significative a été relevée chez deux des trois patients sur l’amplitude articulaire active du coude (flexion/extension). Cependant, aux mêmes temps de mesure, aucune amélioration significative n’a été notée sur l’amplitude articulaire active de l’épaule (abduction de l’épaule, abduction transversale et flexion de l’épaule).
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude de cas unique, indiquent que la rééducation du MS utilisant le système ARMin I est efficace pour améliorer l’amplitude articulaire du coude (mais pas celle de l’épaule) de patients en phase chronique de récupération post-AVC.
Une étude de cas unique (Staubli et al., 2009) a examiné les effets de la rééducation du MS assistée par robot utilisant le système ARMin II sur la cinématique du MS de patients en phase chronique de récupération post-AVC. Cette étude de cas unique a assigné quatre patients à une rééducation du MS assistée par robot utilisant l’exosquelette robotisé ARMin II (6 degrés de liberté du mouvement de l’épaule et de l’articulation du coude/poignet). Cette rééducation assistée par robot consiste en une série d’exercices dirigés passifs/actifs et actifs-assistés avec rétroaction visuelle et auditive. À 8 semaines, après l’intervention, et à 6 mois, au moment d’un suivi, aucune amélioration significative n’a été notée sur la cinématique du MS (torsion maximale volontaire).
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude de cas unique, indiquent que la rééducation du MS assistée par robot utilisant le système ARMin II n’est pas efficace pour améliorer la cinématique du MS de patients en phase chronique de récupération post-AVC.
Une étude de cas unique (Nef et al., 2009) a examiné les effets de la rééducation du MS assistée par robot utilisant le système ARMin I sur la coordination du MS de patients en phase chronique de récupération post-AVC. Cette étude de cas unique a assigné trois patients à une rééducation du MS assistée par robot utilisant le système ARMin I. Cette rééducation assistée par robot consiste en une série d’exercices dirigés du mouvement d’atteindre de l’avant-bras et de l’épaule avec rétroaction auditive, visuelle et tactile. À 8 semaines, après l’intervention, une amélioration significative a été relevée sur la coordination du MS au niveau de l’abduction/adduction transversale et de la flexion du coude. Cette amélioration significative ne s’est toutefois pas maintenue au moment du suivi de 16 semaines.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude de cas unique, indiquent que la rééducation du MS utilisant le système ARMin I est efficace, à court terme, pour améliorer la coordination du MS de patients en phase chronique de récupération post-AVC.
Deux études de cas unique (Nef et al., 2009 et Staubli et al., 2009) ont examiné les effets de la rééducation du MS assistée par robot utilisant le système ARMin I ou II sur la fonction du MS de patients en phase chronique de récupération post-AVC.
La première étude cas unique (Nef et al., 2009) a assigné trois patients à une rééducation du MS assistée par robot utilisant le système ARMin I. Cette rééducation assistée par robot consiste en une série d’exercices dirigés du mouvement d’atteindre de l’avant-bras et de l’épaule avec rétroaction auditive, visuelle et tactile. À 8 semaines, après l’intervention, une amélioration significative a été notée sur la fonction du MS des trois patients (telle que mesurée par la Fugl-Meyer Assessment of Upper Extremity Function), cependant, lors du suivi de 16 semaines, seulement l’un d’entre eux a conservé cette amélioration significative.
Note : Aucune amélioration significative n’a été notée sur une autre mesure de la fonction du MS (Action Research Arm Test), à aucun des temps de mesure.
La seconde étude de cas unique (Staubli et al., 2009) a assigné quatre patients à une rééducation du MS assistée par robot utilisant l’exosquelette robotisé ARMin II (6 degrés de liberté du mouvement de l’épaule et de l’articulation du coude/poignet). Cette rééducation assistée par robot consiste en une série d’exercices dirigés passifs/actifs et actifs-assistés avec rétroaction visuelle et auditive. À 8 semaines, après l’intervention, et à 6 mois, au moment d’un suivi, une amélioration significative a été relevée sur la fonction du MS chez trois des quatre patients telle que mesurée par la Fugl-Meyer Assessment of Upper Extremity Function et le Wolf Motor Function Test.
Conclusion : Des données probantes limitées (niveau 2b), provenant de deux études de cas unique, indiquent que la rééducation du MS utilisant le système ARMin I et ARMin II est efficace pour améliorer la fonction du MS de patients en phase chronique de récupération post-AVC.
Une étude de cas unique (Nef et al., 2009) a examiné les effets de la rééducation du MS assistée par robot utilisant le système ARMin I sur la force du MS de patients en phase chronique de récupération post-AVC. Cette étude de cas unique a assigné trois patients à une rééducation du MS assistée par robot utilisant le système ARMin I. Cette rééducation assistée par robot consiste en une série d’exercices dirigés du mouvement d’atteindre de l’avant-bras et de l’épaule avec rétroaction auditive, visuelle et tactile. À 8 semaines, après l’intervention, et à 16 semaines, au moment d’un suivi, une amélioration significative a été relevée sur la force du MS au niveau de l’extension/adduction de l’épaule, de la flexion/abduction de l’épaule et de l’abduction transversale.
Note : Aucune différence significative n’a été notée sur la force du MS au niveau de l’adduction transversale de l’épaule.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude de cas unique, indiquent que la rééducation du MS utilisant le système ARMin I est efficace pour améliorer la force de l’épaule du MS de patients en phase chronique de récupération post-AVC.
Indépendance fonctionnelle
Inefficace
2b
Une étude de cas unique (Nef et al., 2009) a examiné les effets de la rééducation du MS assistée par robot utilisant le système ARMin I sur l’indépendance fonctionnelle de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné trois patients à une rééducation du MS assistée par robot utilisant le système ARMin I. Cette rééducation assistée par robot consiste en une série d’exercices dirigés du mouvement d’atteindre de l’avant-bras et de l’épaule avec rétroaction auditive, visuelle et tactile. À 8 semaines, après l’intervention, et à 16 semaines, au moment d’un suivi, aucune amélioration significative n’a été notée sur l’indépendance fonctionnelle telle que mesurée par l’Indice de Barthel.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude de cas unique, indiquent que la rééducation du MS utilisant le système ARMin I n’est pas efficace pour améliorer l’indépendance fonctionnelle de patients en phase chronique de récupération post-AVC.
Négligence unilatérale
Inefficace
2b
Une étude de cas unique (Staubli et al., 2009) a examiné les effets de la rééducation du MS assistée par robot utilisant le système ARMin II sur la négligence unilatérale de patients en phase chronique de récupération post-AVC. Cette étude de cas unique a assigné quatre patients à une rééducation du MS assistée par robot utilisant l’exosquelette robotisé ARMin II (6 degrés de liberté du mouvement de l’épaule et de l’articulation du coude/poignet). Cette rééducation assistée par robot consiste en une série d’exercices dirigés passifs/actifs et actifs-assistés avec rétroaction visuelle et auditive. À 8 semaines, après l’intervention, et à 6 mois, au moment d’un suivi, aucune amélioration significative n’a été notée sur la négligence unilatérale telle que mesurée par la Catherine Bergego Scale.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude de cas unique, indiquent que la rééducation du MS assistée par robot utilisant le système ARMin II n’est pas efficace pour améliorer la négligence unilatérale de patients en phase chronique de récupération post-AVC.
Une étude de cas unique (Staubli et al., 2009) a examiné les effets de la rééducation du MS assistée par robot utilisant le système ARMin II sur la satisfaction de patients en phase chronique de récupération post-AVC. Cette étude de cas unique a assigné quatre patients à une rééducation du MS assistée par robot utilisant l’exosquelette robotisé ARMin II (6 degrés de liberté du mouvement de l’épaule et de l’articulation du coude/poignet). Cette rééducation assistée par robot consiste en une série d’exercices dirigés passifs/actifs et actifs-assistés avec rétroaction visuelle et auditive. À 8 semaines, après l’intervention, et à 6 mois, au moment d’un suivi, aucune amélioration significative n’a été notée sur la satisfaction des patients (mesure subjective dans les tâches des AVQ, progrès, changement, et motivation utilisant un questionnaire non-standardisé).
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude de cas unique, indiquent que la rééducation du MS assistée par robot utilisant le système ARMin II n’est pas efficace pour améliorer la satisfaction de patients en phase chronique de récupération post-AVC.
Une étude de cas unique (Staubli et al., 2009) a examiné les effets de la rééducation du MS assistée par robot utilisant le système ARMin II sur la sensibilité du MS de patients en phase chronique de récupération post-AVC. Cette étude de cas unique a assigné quatre patients à une rééducation du MS assistée par robot utilisant l’exosquelette robotisé ARMin II (6 degrés de liberté du mouvement de l’épaule et de l’articulation du coude/poignet). Cette rééducation assistée par robot consiste en une série d’exercices dirigés passifs/actifs et actifs-assistés avec rétroaction visuelle et auditive. À 8 semaines, après l’intervention, et à 6 mois, au moment d’un suivi, aucune amélioration significative n’a été notée sur la sensibilité du MS telle que mesurée par l’American Spinal Cord Injury Association Test.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude de cas unique, indiquent que la rééducation du MS assistée par robot utilisant le système ARMin II n’est pas efficace pour améliorer la sensibilité du MS de patients en phase chronique de récupération post-AVC.
Phase chronique - BATRAC
Amplitude articulaire
Efficace
2b
Une étude quasi-expérimentale (Whitall et al., 2000) a examiné les effets de la rééducation du MS assistée par robot utilisant le système BATRAC (Bilateral Arm Training with Rhythmic Auditory Cueing) sur l’amplitude articulaire de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients à une rééducation du MS assistée par robot utilisant le système BATRAC. Cette rééducation assistée par robot consiste en une rééducation bilatérale du bras avec des indices rythmiques auditifs lors d’exercices de pousser et de tirer sur deux poignées coulissantes dans un plan transversal. À 6 semaines, après l’intervention, une amélioration significative a été relevée sur quelques mesures de l’amplitude articulaire telle que mesurée à l’aide d’un goniomètre, au niveau l’épaule parétique (amplitude articulaire active en extension), du poignet (amplitude articulaire active et passive en flexion), et du pouce (amplitude articulaire active en opposition). Au moment du suivi de 2 mois, cette amélioration significative ne s’est seulement maintenue qu’au niveau de l’amplitude articulaire active du pouce en opposition (membre parétique).
Note : Aucune amélioration significative n’a été notée au niveau de l’amplitude articulaire active ou passive du coude, à aucun des temps de mesure.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système BATRAC est efficace pour améliorer quelques mouvements de l’amplitude articulaire de l’épaule, du poignet et du pouce de patients en phase chronique de récupération post-AVC.
Fonction du MS
Inefficace
1b
Un ECR de haute qualité (Luft et al., 2004) et une étude quasi-expérimentale (Whitall et al., 2000) ont examiné les effets de la rééducation du MS assistée par robot utilisant le système BATRAC (Bilateral Arm Training with Rhythmic Auditory Cueing) sur la fonction du MS de patients en phase chronique de récupération post-AVC.
L’ECR de haute qualité (Luft et al., 2004) a assigné aléatoirement les patients à une rééducation du MS assistée par robot utilisant le système BATRAC ou à un programme d’exercices thérapeutiques standardisés et appariés. Cette rééducation assistée par robot d’une durée de 6 semaines consiste en une rééducation bilatérale du bras avec des indices rythmiques auditifs lors d’exercices de pousser et de tirer sur deux poignées coulissantes dans un plan transversal. Deux semaines après l’intervention de 6 semaines, aucune amélioration significative n’a été notée sur la fonction du MS (telle que mesurées par la Fugl-Meyer Assessment of Upper Extremity Function, et les scores Weight et Time du Wolf Motor Function Test).
Note : Cependant, une différence significative entre les groupes a été relevée sur le score de la Fugl-Meyer Assessment of Upper Extremity Function lors d’analyses d’un sous-groupe de patients ayant une réponse positive sur l’Imagerie par résonance magnétique fonctionnelle (fMRI) deux 2 semaines après l’intervention de 6 semaines, en faveur de la rééducation du MS assistée comparée à un programme d’exercices thérapeutiques standardisés et appariés.
L’étude quasi-expérimentale (Whitall et al., 2000) a assigné les patients à une rééducation du MS assistée par robot utilisant le système BATRAC. Cette rééducation assistée par robot consiste en une rééducation bilatérale du bras avec des indices rythmiques auditifs lors d’exercices de pousser et de tirer sur deux poignées coulissantes dans un plan transversal. À 6 semaines, après l’intervention, et à 2 mois, au moment d’un suivi, une amélioration significative a été relevée sur la fonction du MS telle que mesurée par la Fugl-Meyer Assessment of Upper Extremity Function, et le scores Time du Wolf Motor Function Test, de même que sur l’utilisation quotidienne du bras hémiparétique (telle que mesurées par l’University of Maryland Arm Questionnaire for Stroke).
Note : Aucune amélioration significative n’a été notée sur les sous-échelles Force et Fonction du Wolf Motor Function Test, à aucun des temps de mesure.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation du MS assistée par robot utilisant le système BATRAC n’est pas plus efficace qu’une intervention comparative (ici, un programme d’exercices thérapeutiques standardisés et appariés) pour améliorer la fonction du MS de patients en phase chronique de récupération post-AVC. Cependant, une étude quasi-expérimentale a relevé des améliorations significatives de la fonction du MS suivant une rééducation du MS assistée par robot utilisant le système BATRAC.
Un ECR de haute qualité (Luft et al., 2004) et une étude quasi-expérimentale (Whitall et al., 2000) ont examiné les effets de la rééducation du MS assistée par robot utilisant le système BATRAC (Bilateral Arm Training with Rhythmic Auditory Cueing) sur la force du MS de patients en phase chronique de récupération post-AVC.
L’ECR de haute qualité (Luft et al., 2004) a assigné aléatoirement les patients à une rééducation du MS assistée par robot utilisant le système BATRAC ou à un programme d’exercices thérapeutiques standardisés et appariés. Cette rééducation assistée par robot d’une durée de 6 semaines consiste en une rééducation bilatérale du bras avec des indices rythmiques auditifs lors d’exercices de pousser et de tirer sur deux poignées coulissantes dans un plan transversal. Deux semaines après l’intervention de 6 semaines, aucune amélioration significative n’a été notée sur la force du coude et de l’épaule (mesurées à l’aide d’un dynamomètre).
L’étude quasi-expérimentale (Whitall et al., 2000) a assigné les patients à une rééducation du MS assistée par robot utilisant le système BATRAC. Cette rééducation assistée par robot consiste en une rééducation bilatérale du bras avec des indices rythmiques auditifs lors d’exercices de pousser et de tirer sur deux poignées coulissantes dans un plan transversal. À 6 semaines, après l’intervention, une amélioration significative a été relevée sur la force isométrique du coude et la force de flexion isométrique du poignet, MS parétique uniquement (telles que mesurées à l’aide d’un dynamomètre), mais aucune amélioration significative n’a été notée au niveau de la force isométrique de l’épaule et du pouce en opposition. Au moment du suivi de 2 mois, une amélioration significative a été relevée au niveau de la force isométrique de la flexion de l’épaule et de l’extension du poignet (MS non-parétique seulement) ; l’absence d’amélioration au niveau de la force isométrique de l’épaule étant cependant de nouveau constatée.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation du MS assistée par robot utilisant le système BATRAC n’est pas plus efficace qu’une intervention comparative (ici, un programme d’exercices thérapeutiques standardisés et appariés) pour améliorer la force du MS de patients en phase chronique de récupération post-AVC. Cependant, une étude quasi-expérimentale a relevé des améliorations significatives de la force du coude et du poignet suivant une rééducation du MS assistée par robot utilisant le système BATRAC.
Force de préhension
Inefficace
2b
Une étude quasi-expérimentale (Whitall et al., 2000) a examiné les effets de la rééducation du MS assistée par robot utilisant le système BATRAC (Bilateral Arm Training with Rhythmic Auditory Cueing) sur la force de préhension de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients à une rééducation du MS assistée par robot utilisant le système BATRAC. Cette rééducation assistée par robot consiste en une rééducation bilatérale du bras avec des indices rythmiques auditifs lors d’exercices de pousser et de tirer sur deux poignées coulissantes dans un plan transversal. À 6 semaines, après l’intervention, et à 2 mois, au moment d’un suivi, aucune amélioration significative n’a été notée sur la force de préhension telle que mesurée à l’aide du BASELINE Hydraulic Hand Dynamometer.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système BATRAC n’est pas efficace pour améliorer la force de préhension de patients en phase chronique de récupération post-AVC.
Phase chronique - Bilateral Forearm and Wrist Trainer
Fonction du MS
Inefficace
2b
Une étude quasi-expérimentale (Hesse et al., 2003) a examiné les effets de la rééducation du MS assistée par robot utilisant le système Bilateral Forearm and Wrist Trainer sur la fonction du MS de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients à une rééducation du MS assistée par robot utilisant un portable ayant un degré de liberté de niveau 1 avec un dispositif d’entraînement permettant l’exécution bilatérale, active et passive, de deux mouvements : la pronation/supination du coude et la dorsiflexion/flexion palmaire du poignet. À 3 semaines (après l’intervention), et à 3 mois (au moment d’un suivi), aucun changement significatif n’a été noté sur la fonction du MS des patients telle que mesurée par la Rivermead Motor Assessment.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système Bilateral Forearm and Wrist Trainer n’est pas efficace pour améliorer la fonction du MS de patients en phase chronique de récupération post-AVC.
Une étude quasi-expérimentale (Hesse et al., 2003) a examiné les effets de la rééducation du MS assistée par robot utilisant le système Bilateral Forearm and Wrist Trainer sur la satisfaction de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients à une rééducation du MS assistée par robot utilisant un portable ayant un degré de liberté de niveau 1 avec un dispositif d’entraînement permettant l’exécution bilatérale, active et passive, de deux mouvements : la pronation/supination du coude et la dorsiflexion/flexion palmaire du poignet. À 3 semaines (après l’intervention) et à 3 mois (au moment d’un suivi), aucun changement significatif n’a été noté sur la satisfaction des patients au sujet de l’effet du traitement sur le tonus musculaire, le contrôle moteur et la réalisation des activités de la vie quotidienne (telle qu’évaluée par un questionnaire standardisé).
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système Bilateral Forearm and Wrist Trainer n’est pas efficace pour améliorer la satisfaction de patients en phase chronique de récupération post-AVC.
Une étude quasi-expérimentale (Hesse et al., 2003) a examiné les effets de la rééducation du MS assistée par robot utilisant le système Bilateral Forearm and Wrist Trainer sur la spasticité de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients à une rééducation du MS assistée par robot utilisant un portable ayant un degré de liberté de niveau 1 avec un dispositif d’entraînement permettant l’exécution bilatérale, active et passive, de deux mouvements : la pronation/supination du coude et la dorsiflexion/flexion palmaire du poignet. À 3 semaines (après l’intervention), et à 3 mois (au moment d’un suivi), une amélioration significative a été relevée sur la spasticité poignet/doigts telle que mesurée par la Modified Ashworth Scale. Aucun changement significatif n’a été noté à partir du même instrument de mesure sur la spasticité du coude, à aucun des temps de mesure.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système Bilateral Forearm and Wrist Trainer est efficace pour réduire la spasticité poignet/doigts (mais pas celle du coude) de patients en phase chronique de récupération post-AVC.
Phase chronique - BFIAMT
Une étude quasi-expérimentale (Chang et al., 2007) a examiné les effets de la rééducation du MS assistée par robot utilisant le système BFIAMT (Bilateral force-induced isokinetic arm movement training) sur la cinématique de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients à une rééducation du MS assistée par robot utilisant le système BFIAMT, consistant en un entraînement de la force induite, bilatérale, des mouvements du bras. À 8 semaines (après l’intervention), une amélioration significative a été relevée sur les mesures de la cinématique (pic de vélocité, pourcentage du temps de pic de vélocité, temps de mouvement et impulsion normalisée), cependant ces améliorations ne se sont pas maintenues au moment du suivi de 16 semaines.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système BFIAMT est efficace, à court terme, pour améliorer les mesures de la cinématique de patients en phase chronique de récupération post-AVC.
Une étude quasi-expérimentale (Chang et al., 2007) a examiné les effets de la rééducation du MS assistée par robot utilisant le système BFIAMT (Bilateral force-induced isokinetic arm movement training) sur la fonction du MS patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients à une rééducation du MS assistée par robot utilisant le système BFIAMT, consistant en un entraînement de la force induite, bilatérale, des mouvements du bras. À 8 semaines (après l’intervention), et à 16 semaines (au moment d’un suivi), une amélioration significative a été relevée sur la fonction du MS telle que mesurée par la Fugl-Meyer Assessment of Upper Extremity Function.
Note : Cependant, aucune amélioration significative n’a été notée sur le score du Frenchay Arm Test, à aucun des temps de mesures.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système BFIAMT est efficace pour améliorer la fonction du MS de patients en phase chronique de récupération post-AVC.
Une étude quasi-expérimentale (Chang et al., 2007) a examiné les effets de la rééducation du MS assistée par robot utilisant le système BFIAMT (Bilateral force-induced isokinetic arm movement training) sur la force du MS patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients à une rééducation du MS assistée par robot utilisant le système BFIAMT, consistant en un entraînement de la force induite, bilatérale, des mouvements du bras. À 8 semaines (après l’intervention), et à 16 semaines (au moment d’un suivi), une amélioration significative a été relevée sur la force de pousser/tirer du MS.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système BFIAMT est efficace pour améliorer la force du MS de patients en phase chronique de récupération post-AVC.
Force de préhension
Efficace
2b
Une étude quasi-expérimentale (Chang et al., 2007) a examiné les effets de la rééducation du MS assistée par robot utilisant le système BFIAMT (Bilateral force-induced isokinetic arm movement training) sur la force de préhension de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients à une rééducation du MS assistée par robot utilisant le système BFIAMT, consistant en un entraînement de la force induite, bilatérale, des mouvements du bras. À 8 semaines (après l’intervention), et à 16 semaines (au moment d’un suivi), une amélioration significative a été relevée sur la force de préhension des patients.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système BFIAMT est efficace pour améliorer la force de préhension de patients en phase chronique de récupération post-AVC.
Une étude quasi-expérimentale (Chang et al., 2007) a examiné les effets de la rééducation du MS assistée par robot utilisant le système BFIAMT (Bilateral force-induced isokinetic arm movement training) sur la spasticité de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients à une rééducation du MS assistée par robot utilisant le système BFIAMT, consistant en un entraînement de la force induite, bilatérale, des mouvements du bras. À 8 semaines (après l’intervention), et à 16 semaines (au moment d’un suivi), aucune amélioration significative n’a été notée sur la spasticité des patients telle que mesurée par la Modified Ashworth Scale.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système BFIAMT n’est pas efficace pour réduire la spasticité de patients en phase chronique de récupération post-AVC.
Phase chronique - Bi-Manu-Track
Activité motrice du MS
Efficace
1b
Un ECR de haute qualité (Liao et al., 2011) a examiné les effets de la rééducation du MS assistée par robot utilisant le système Bi-Manu-Track sur l’activité motrice du MS de patients en phase chronique de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients à une rééducation du MS assistée par robot utilisant le système Bi-Manu-Track ou à des exercices appariés de réadaptation habituelle. Cette rééducation assistée par robot consiste en une série de mouvements bilatéraux de l’avant-bras (pronation/supination) et du poignet (flexion/extension), exécutés comme devant un miroir sous quatre modes d’implication : passif-passif, passif-actif, actif-actif, et actif-passif. À 4 semaines (après l’intervention), une différence significative entre les groupes a été relevée sur l’activité motrice du MS telle que mesurée par les sous-échelles Amount of Use et Quality of Movement du Motor Activity Log et par l’Arm Activity Ratio, en faveur de la rééducation du MS assistée par robot comparée aux exercices appariés de réadaptation habituelle.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation du MS assistée par robot utilisant le système Bi-Manu-Track est plus efficace qu’une intervention comparative (ici, un programme d’exercices appariés de réadaptation habituelle) pour améliorer l’activité motrice du MS de patients en phase chronique de récupération post-AVC.
Un ECR de haute qualité (Liao et al., 2011) a examiné les effets de la rééducation du MS assistée par robot utilisant le système Bi-Manu-Track sur la fonction du MS de patients en phase chronique de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients à une rééducation du MS assistée par robot utilisant le système Bi-Manu-Track ou à des exercices appariés de réadaptation habituelle. Cette rééducation assistée par robot consiste en une série de mouvements bilatéraux de l’avant-bras (pronation/supination) et du poignet (flexion/extension), exécutés comme devant un miroir sous quatre modes d’implication : passif-passif, passif-actif, actif-actif, et actif-passif. À 4 semaines (après l’intervention), une différence significative entre les groupes a été relevée sur la fonction du MS (telle que mesurée par la Fugl-Meyer Assessment of Upper Extremity Function), de même que sur la perception d’utilisation du membre affecté (mesurée par l’ABILHAND), en faveur de la rééducation du MS assistée par robot comparée aux exercices appariés de réadaptation habituelle.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation du MS assistée par robot utilisant le système Bi-Manu-Track est plus efficace qu’une intervention comparative (ici, un programme d’exercices appariés de réadaptation habituelle) pour améliorer la fonction du MS de patients en phase chronique de récupération post-AVC.
Indépendance fonctionnelle
Inefficace
1b
Un ECR de haute qualité (Liao et al., 2011) a examiné les effets de la rééducation du MS assistée par robot utilisant le système Bi-Manu-Track sur l’indépendance fonctionnelle de patients en phase chronique de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients à une rééducation du MS assistée par robot utilisant le système Bi-Manu-Track ou à des exercices appariés de réadaptation habituelle. Cette rééducation assistée par robot consiste en une série de mouvements bilatéraux de l’avant-bras (pronation/supination) et du poignet (flexion/extension), exécutés comme devant un miroir sous quatre modes d’implication : passif-passif, passif-actif, actif-actif, et actif-passif. À 4 semaines (après l’intervention), aucune différence significative entre les groupes n’a été notée sur l’indépendance fonctionnelle telle qu’évaluée par la Mesure de l’indépendance fonctionnelle.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation du MS assistée par robot utilisant le système Bi-Manu-Track n’est pas plus efficace qu’une intervention comparative (ici, un programme d’exercices appariés de réadaptation habituelle) pour améliorer l’indépendance fonctionnelle de patients en phase chronique de récupération post-AVC.
Phase chronique - Braccio di Ferro
Deux études quasi-expérimentales (Casadio et al., 2009 et Vergaro et al., 2010) ont examiné les effets de la rééducation du MS assistée par robot utilisant le système Braccio di Ferro sur la cinématique du MS de patients en phase chronique de récupération post-AVC.
La première étude quasi-expérimentale (Casadio et al., 2009) a assigné les patients à une rééducation du MS assistée par robot utilisant le système Braccio di Ferro. Cette rééducation assistée par robot consiste en une série d’exercices dirigés du mouvement d’atteindre de l’épaule et du coude sur un plan horizontal avec rétroaction visuelle et tactile. À 10 semaines (après l’intervention), une amélioration significative a été relevée sur toutes les mesures de la cinématique du MS (vitesse moyenne, nombre de sous-mouvements, erreur prédéterminée après le premier sous-mouvement, ratio entre la durée du premier sous-mouvement et le temps total requis pour atteindre la cible), cependant, cette amélioration ne s’est pas maintenue au moment du suivi de 3 mois.
La seconde étude quasi-expérimentale (Vergaro et al., 2010) a assigné les patients à une rééducation du MS assistée par robot utilisant le système Braccio di Ferro. Cette rééducation assistée par robot consiste en une série de dix mouvements dirigés et continus du coude suivant la trajectoire de huit formes. Après 6 à 12 séances d’intervention, une amélioration significative a été relevée sur les mesures de la cinématique du MS (fluidité et précision du mouvement).
Conclusion : Des données probantes limitées (niveau 2b), provenant de deux études quasi-expérimentales, indiquent que la rééducation du MS utilisant le système Braccio di Ferro est efficace pour améliorer la cinématique du MS de patients en phase chronique de récupération post-AVC.
Note : Pour l’une de ces études, l’amélioration s’est avérée significative seulement à court terme.
Deux études quasi-expérimentales (Casadio et al., 2009 et Vergaro et al., 2010) ont examiné les effets de la rééducation du MS assistée par robot utilisant le système Braccio di Ferro sur la fonction du MS de patients en phase chronique de récupération post-AVC.
La première étude quasi-expérimentale (Casadio et al., 2009) a assigné les patients à une rééducation du MS assistée par robot utilisant le système Braccio di Ferro. Cette rééducation assistée par robot consiste en une série d’exercices dirigés du mouvement d’atteindre de l’épaule et du coude sur un plan horizontal avec rétroaction visuelle et tactile. À 10 semaines (après l’intervention), une amélioration significative a été relevée sur la fonction du MS (telle que mesurée par la Fugl-Meyer Assessment of Upper Extremity Function), cependant, cette amélioration ne s’est pas maintenue au moment du suivi de 3 mois.
La seconde étude quasi-expérimentale (Vergaro et al., 2010) a assigné les patients à une rééducation du MS assistée par robot utilisant le système Braccio di Ferro. Cette rééducation assistée par robot consiste en une série de dix mouvements dirigés et continus du coude suivant la trajectoire de huit formes. Après 6 à 12 séances d’intervention, une amélioration significative a été relevée sur la fonction du MS telle que mesurée par la Fugl-Meyer Assessment of Upper Extremity Function.
Conclusion : Des données probantes limitées (niveau 2b), provenant de deux études quasi-expérimentales, indiquent que la rééducation du MS utilisant le système Braccio di Ferro est efficace pour améliorer la fonction du MS de patients en phase chronique de récupération post-AVC.
Note : Pour l’une de ces études, l’amélioration s’est avérée significative seulement à court terme.
Deux études quasi-expérimentales (Casadio et al., 2009 et Vergaro et al., 2010) ont examiné les effets de la rééducation du MS assistée par robot utilisant le système Braccio di Ferro sur la spasticité du MS de patients en phase chronique de récupération post-AVC.
La première étude quasi-expérimentale (Casadio et al., 2009) a assigné les patients à une rééducation du MS assistée par robot utilisant le système Braccio di Ferro. Cette rééducation assistée par robot consiste en une série d’exercices dirigés du mouvement d’atteindre de l’épaule et du coude sur un plan horizontal avec rétroaction visuelle et tactile. À 10 semaines (après l’intervention), et à 3 mois (au moment d’un suivi), aucun changement significatif n’a été noté sur la spasticité des muscles fléchisseurs du MS telle que mesurée par l’Ashworth Scale.
La seconde étude quasi-expérimentale (Vergaro et al., 2010) a assigné les patients à une rééducation du MS assistée par robot utilisant le système Braccio di Ferro. Cette rééducation assistée par robot consiste en une série de dix mouvements dirigés et continus du coude suivant la trajectoire de huit formes. Après 6 à 12 séances d’intervention, aucun changement significatif n’a été noté sur la spasticité du MS telle que mesurée par l’Ashworth Scale.
Conclusion : Des données probantes limitées (niveau 2b), provenant de deux études quasi-expérimentales, indiquent que la rééducation du MS utilisant le système Braccio di Ferro n’est pas efficace pour réduire la spasticité du MS de patients en phase chronique de récupération post-AVC.
Phase chronique - Elbow and Wrist Assistive Rehabilitation Device
Deux études quasi-expérimentales (Hu et al., 2007 et Hu et al., 2009) ont examiné les effets de la rééducation du MS assistée par robot utilisant un dispositif de réadaptation assistée du coude et du poignet sur la fonction du MS de patients en phase chronique de récupération post-AVC.
La première étude quasi-expérimentale (Hu et al., 2007) a assigné les patients à une rééducation du coude assistée par robot consistant en une série de mouvements dirigés de flexion/extension du coude sur un plan horizontal. À 7 semaines (après l’intervention), une amélioration significative a été relevée sur la fonction du MS telle que mesurée par la Fugl-Meyer Assessment of Upper Extremity Function et la Motor Status Scale.
La seconde étude quasi-expérimentale (Hu et al., 2009) a assigné les patients à une rééducation du poignet assistée par robot consistant en une série de mouvements dirigés de flexion/extension du poignet sur un plan horizontal. À 7 semaines (après l’intervention), une amélioration significative a été relevée sur la fonction du MS telle que mesurée par les sous-échelles épaule/coude et poignet/main de la Fugl-Meyer Assessment of Upper Extremity Function.
Note : Cependant, aucun changement significatif n’a été noté sur les résultats de l’Action Research Arm Test.
Conclusion : Des données probantes limitées (niveau 2b), provenant de deux études quasi-expérimentales, indiquent que la rééducation du MS assistée par robot utilisant un dispositif de réadaptation assistée du coude et du poignet est efficace pour améliorer la fonction du MS de patients en phase chronique de récupération post-AVC.
Indépendance fonctionnelle
inefficace
2b
Une étude quasi-expérimentale (Hu et al., 2009) a examiné les effets de la rééducation du MS assistée par robot utilisant un dispositif de réadaptation assistée du poignet sur l’indépendance fonctionnelle de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients à une rééducation du poignet assistée par robot consistant en une série de mouvements dirigés de flexion/extension du poignet sur un plan horizontal. À 7 semaines (après l’intervention), aucun changement significatif n’a été noté sur l’indépendance fonctionnelle des patients telle qu’évaluée par la Mesure de l’indépendance fonctionnelle.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant un dispositif de réadaptation assistée du poignet n’est pas efficace pour améliorer l’indépendance fonctionnelle de patients en phase chronique de récupération post-AVC.
Deux études quasi-expérimentales (Hu et al., 2007 et Hu et al., 2009) ont examiné les effets de la rééducation du MS assistée par robot utilisant un dispositif de réadaptation assistée du coude et du poignet sur la spasticité du MS de patients en phase chronique de récupération post-AVC.
La première étude quasi-expérimentale (Hu et al., 2007) a assigné les patients à une rééducation du MS assistée par robot consistant en une série de mouvements dirigés de flexion/extension du coude sur un plan horizontal. À 7 semaines (après l’intervention), une réduction significative de la spasticité du MS a été relevée sur la mesure de la Modified Ashworth Scale.
La seconde étude quasi-expérimentale (Hu et al., 2009) a assigné les patients à une rééducation du poignet assistée par robot consistant en une série de mouvements dirigés de flexion/extension du poignet sur un plan horizontal. À 7 semaines (après l’intervention), une réduction significative de la spasticité du coude et du poignet a été relevée sur la mesure de la Modified Ashworth Scale.
Conclusion : Des données probantes limitées (niveau 2b), provenant de deux études quasi-expérimentales, indiquent que la rééducation du MS assistée par robot utilisant un dispositif de réadaptation assistée du coude et du poignet est efficace pour réduire la spasticité de patients en phase chronique de récupération post-AVC.
Phase chronique - GENTLE/S
Amplitude articulaire
Inefficace
2b
Une étude d’une série de cas uniques (Amirabdollahian et al., 2007) a examiné les effets de la rééducation du MS assistée par robot utilisant le système GENTLE/S sur l’amplitude articulaire du MS de patients en phase chronique de récupération post-AVC. Cette étude d’une série de 31 cas uniques a adopté un modèle de mesures de base multiple et a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le système GENTLE/S, un entraînement du MS avec attelles de soutien, ou aucune intervention selon un ordre de phase ABC ou ACB (A : aucune intervention – données au départ de l’étude -, B : rééducation utilisant le système GENTLE/S, C : entraînement avec attelles de soutien). La rééducation utilisant le système GENTLE/S consiste en une série de mouvements dirigés d’atteindre et de retrait du bras parétique sous trois modes : passif, actif-assisté et actif. À la fin de chacune des phases (3 semaines), aucune différence n’a été notée sur l’amplitude articulaire active ou passive du coude et de l’épaule.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude d’une série de cas uniques, indiquent que la rééducation du MS utilisant le système GENTLE/S n’est pas plus efficace qu’aucune intervention ou une intervention comparative (ici, un entraînement avec attelles de soutien) pour améliorer l’amplitude articulaire du MS de patients en phase chronique de récupération post-AVC.
Une étude d’une série de cas uniques (Amirabdollahian et al., 2007) a examiné les effets de la rééducation du MS assistée par robot utilisant le système GENTLE/S sur la fonction du MS de patients en phase chronique de récupération post-AVC. Cette étude d’une série de 31 cas uniques a adopté un modèle de mesures de base multiple et a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le système GENTLE/S, un entraînement du MS avec attelles de soutien, ou aucune intervention selon un ordre de phase ABC ou ACB (A : aucune intervention – données au départ de l’étude -, B : rééducation utilisant le système GENTLE/S, C : entraînement avec attelles de soutien). La rééducation utilisant le système GENTLE/S consiste en une série de mouvements dirigés d’atteindre et de retrait du bras parétique sous trois modes : passif, actif-assisté et actif. À la fin des phases d’intervention (3 semaines), une différence significative entre les phases a été relevée sur la fonction du MS (telle que mesurée par la Fugl-Meyer Assessment of Upper Extremity), en faveur de la rééducation du MS assistée par robot utilisant le système GENTLE/S et de l’entraînement du MS avec attelles de soutien ,comparés à aucune intervention (données au départ de l’étude). Aucune différence significative n’a été notée entre la rééducation du MS assistée par robot et l’entraînement du MS avec attelles de soutien.
Note : Aucune différence significative n’a été notée entre les phases sur la mesure de la Motor Assessment Scale.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude d’une série de cas uniques, indiquent que la rééducation du MS utilisant le système GENTLE/S est plus efficace qu’aucune intervention pour améliorer la fonction du MS de patients en phase chronique de récupération post-AVC.
Note : La rééducation du MS assistée par robot utilisant le système GENTLE/S n’est pas plus efficace que l’entraînement du MS avec attelles de soutien pour améliorer la fonction du MS.
Phase chronique - HandCare
Cinématique
Évidence insuffisante
5
Une étude de cas unique (Dovat et al., 2010) a examiné les effets de la rééducation du MS assistée par robot utilisant le système HandCare sur la cinématique de la main de patients en phase chronique de récupération post-AVC. Cette étude de cas unique a assigné deux patients à une rééducation du MS assistée par robot utilisant le système HandCare (Hand Cable-Actuated Rehabilitation) qui consiste en une série d’exercices dirigés de coordination et d’indépendance des doigts. À 8 semaines (après l’intervention), une amélioration significative a été relevée sur la cinématique de la main (fluidité des mouvements des doigts dans l’ouverture de la main, coordination des mouvements des doigts dans l’ouverture et la fermeture de la main, indépendance des doigts, force de modulation du majeur).
Conclusion : Des données probantes insuffisantes (niveau 5) ont été relevées au sujet de l’efficacité de la rééducation du MS assistée par robot utilisant le système HandCare sur la cinématique de la main de patients en phase chronique de récupération post-AVC. Cependant, il convient de noter qu’une étude de cas unique a relevé une amélioration sur les mesures de la cinématique de la main suivant une rééducation du MS assistée par robot utilisant le système HandCare.
Fonction du MS
Évidence insuffisante
5
Une étude de cas unique (Dovat et al., 2010) a examiné les effets de la rééducation du MS assistée par robot utilisant le système HandCare sur la fonction du MS de patients en phase chronique de récupération post-AVC. Cette étude de cas unique a assigné deux patients à une rééducation du MS assistée par robot utilisant le système HandCare (Hand Cable-Actuated Rehabilitation) qui consiste en une série d’exercices dirigés de coordination et d’indépendance des doigts. À 8 semaines (après l’intervention), aucune amélioration significative n’a été notée sur la fonction de la main telle que mesurée par le Chedoke McMaster Impairment Inventory.
Conclusion : Des données probantes insuffisantes (niveau 5) ont été relevées au sujet de l’efficacité de la rééducation du MS assistée par robot utilisant le système HandCare sur la fonction du MS de patients en phase chronique de récupération post-AVC. Cependant, il convient de noter qu’une étude de cas unique n’a noté aucune amélioration sur la fonction du MS suivant une rééducation du MS assistée par robot utilisant le système HandCare.
Phase chronique - HapticKnob
Une étude de type pré/post (Lambercy et al., 2011) a examiné les effets de la rééducation du MS assistée par robot utilisant le système HapticKnob sur la cinématique de la main de patients en phase chronique de récupération post-AVC. Cette étude de type pré/post a assigné les patients à une rééducation du MS assistée par robot utilisant le système HapticKnob qui consiste en une série d’exercices dirigés d’ouverture et de fermeture de la main et de pronation/supination de l’avant-bras. À 6 semaines (après l’intervention), une amélioration significative a été relevée sur la cinématique de la main (contrôle moteur de la main, temps et fluidité du mouvement).
Note : Les mesures de la cinématique de la main n’ont pas été prises lors du suivi de 12 semaines.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude de type pré/post, indiquent que la rééducation du MS utilisant le système HapticKnob est efficace pour améliorer la cinématique de la main de patients en phase chronique de récupération post-AVC.
Une étude de type pré/post (Lambercy et al., 2011) a examiné les effets de la rééducation du MS assistée par robot utilisant le système HapticKnob sur la dextérité de patients en phase chronique de récupération post-AVC. Cette étude de type pré/post a assigné les patients à une rééducation du MS assistée par robot utilisant le système HapticKnob qui consiste en une série d’exercices dirigés d’ouverture et de fermeture de la main et de pronation/supination de l’avant-bras. À 6 semaines (après l’intervention), et à 12 semaines (au moment d’un suivi), aucune amélioration significative n’a été notée sur la dextérité des patients telle que mesurée par le Nine Hole Peg Test.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude de type pré/post, indiquent que la rééducation du MS utilisant le système HapticKnob n’est pas efficace pour améliorer la dextérité de patients en phase chronique de récupération post-AVC.
Une étude de type pré/post (Lambercy et al., 2011) a examiné les effets de la rééducation du MS assistée par robot utilisant le système HapticKnob sur la douleur au MS de patients en phase chronique de récupération post-AVC. Cette étude de type pré/post a assigné les patients à une rééducation du MS assistée par robot utilisant le système HapticKnob qui consiste en une série d’exercices dirigés d’ouverture et de fermeture de la main et de pronation/supination de l’avant-bras. À 6 semaines (après l’intervention), et à 12 semaines (au moment d’un suivi), aucun changement significatif n’a été noté sur la douleur au MS des patients telle que mesurée par une Échelle visuelle analogue.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude de type pré/post, indiquent que la rééducation du MS utilisant le système HapticKnob n’est pas efficace pour réduire la douleur au MS de patients en phase chronique de récupération post-AVC.
Une étude de type pré/post (Lambercy et al., 2011) a examiné les effets de la rééducation du MS assistée par robot utilisant le système HapticKnob sur la fonction du MS de patients en phase chronique de récupération post-AVC. Cette étude de type pré/post a assigné les patients à une rééducation du MS assistée par robot utilisant le système HapticKnob qui consiste en une série d’exercices dirigés d’ouverture et de fermeture de la main et de pronation/supination de l’avant-bras. À 6 semaines (après l’intervention), et à 12 semaines (au moment d’un suivi), une amélioration significative a été relevée sur la majorité des mesures de la fonction du MS (score total et sous-échelle poignet/main de la Fugl-Meyer Assessment of Upper Extremity, score total et sous-échelle épaule/coude du Motricity Index, et sur la Motor Assessment Scale).
Note : Aucune amélioration significative n’a été notée sur la sous-échelle épaule/coude de la Fugl-Meyer Assessment of Upper Extremity, ni sur la sous-échelle main/doigt du Motricity Index, ni sur les résultats du Functional Test of the Hemiparetic Upper Extremity, et ce, à aucun des temps de mesure.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude de type pré/post, indiquent que la rééducation du MS utilisant le système HapticKnob est efficace pour améliorer la fonction du MS de patients en phase chronique de récupération post-AVC.
Force de préhension
Inefficace
2b
Une étude de type pré/post (Lambercy et al., 2011) a examiné les effets de la rééducation du MS assistée par robot utilisant le système HapticKnob sur la force de préhension de patients en phase chronique de récupération post-AVC. Cette étude de type pré/post a assigné les patients à une rééducation du MS assistée par robot utilisant le système HapticKnob qui consiste en une série d’exercices dirigés d’ouverture et de fermeture de la main et de pronation/supination de l’avant-bras. À 6 semaines (après l’intervention), et à 12 semaines (au moment d’un suivi), aucune amélioration significative n’a été notée sur la force de préhension des patients telle que mesurée à l’aide d’un dynamomètre.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude de type pré/post, indiquent que la rééducation du MS utilisant le système HapticKnob n’est pas efficace pour améliorer la force de préhension de patients en phase chronique de récupération post-AVC.
Une étude de type pré/post (Lambercy et al., 2011) a examiné les effets de la rééducation du MS assistée par robot utilisant le système HapticKnob sur la satisfaction de patients en phase chronique de récupération post-AVC. Cette étude de type pré/post a assigné les patients à une rééducation du MS assistée par robot utilisant le système HapticKnob qui consiste en une série d’exercices dirigés d’ouverture et de fermeture de la main et de pronation/supination de l’avant-bras. À 6 semaines (après l’intervention), et à 12 semaines (au moment d’un suivi), aucune amélioration significative n’a été notée sur la satisfaction des patients telle que mesurée par une Échelle de Likert à quatre points.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude de type pré/post, indiquent que la rééducation du MS utilisant le système HapticKnob n’est pas efficace pour améliorer la satisfaction de patients en phase chronique de récupération post-AVC.
Une étude de type pré/post (Lambercy et al., 2011) a examiné les effets de la rééducation du MS assistée par robot utilisant le système HapticKnob sur la spasticité de patients en phase chronique de récupération post-AVC. Cette étude de type pré/post a assigné les patients à une rééducation du MS assistée par robot utilisant le système HapticKnob qui consiste en une série d’exercices dirigés d’ouverture et de fermeture de la main et de pronation/supination de l’avant-bras. À 6 semaines (après l’intervention), aucune réduction significative n’a été notée sur la spasticité telle que mesurée par la Modified Ashworth Scale, cependant, à 12 semaines (au moment d’un suivi), une réduction significative de la spasticité a été relevée.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude de type pré/post, indiquent que la rééducation du MS utilisant le système HapticKnob n’est pas efficace, à court terme, pour réduire la spasticité de patients en phase chronique de récupération post-AVC.
Note : Cependant, une réduction significative de la spasticité a été relevée lors du suivi, 6 semaines après l’intervention.
Phase chronique - L-EXOS
Amplitude articulaire
Efficace
2b
Une étude quasi-expérimentale (Frisoli et al., 2009) a examiné les effets de la rééducation du MS assistée par robot utilisant le système L-EXOS sur l’amplitude articulaire de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients à une rééducation du MS assistée par robot utilisant le dispositif L-EXOS (Light Exoskeleton). Cette rééducation assistée par robot consiste en une série d’exercices dirigés du mouvement d’atteindre selon une trajectoire définie et des tâches de mouvements libres impliquant les articulations de l’épaule et du coude dans un environnement intégré de réalité virtuelle. À 6 semaines (après l’intervention), une amélioration significative a été relevée sur l’amplitude articulaire active de l’épaule et du coude.
Note : Lors de cette évaluation, aucun changement significatif n’a été noté sur l’amplitude articulaire passive de l’épaule et du coude.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système L-EXOS est efficace pour améliorer l’amplitude articulaire active de patients en phase chronique de récupération post-AVC.
Une étude quasi-expérimentale (Frisoli et al., 2009) a examiné les effets de la rééducation du MS assistée par robot utilisant le système L-EXOS sur la fonction du MS de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients à une rééducation du MS assistée par robot utilisant le dispositif L-EXOS (Light Exoskeleton). Cette rééducation assistée par robot consiste en une série d’exercices dirigés du mouvement d’atteindre selon une trajectoire définie et des tâches de mouvements libres impliquant les articulations de l’épaule et du coude dans un environnement intégré de réalité virtuelle. À 6 semaines (après l’intervention), une amélioration significative a été relevée sur la fonction du MS telle que mesurée par la Fugl-Meyer Assessment of Upper Extremity Function.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système L-EXOS est efficace pour améliorer la fonction du MS de patients en phase chronique de récupération post-AVC.
Une étude quasi-expérimentale (Frisoli et al., 2009) a examiné les effets de la rééducation du MS assistée par robot utilisant le système L-EXOS sur la spasticité du MS de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients à une rééducation du MS assistée par robot utilisant le dispositif L-EXOS (Light Exoskeleton). Cette rééducation assistée par robot consiste en une série d’exercices dirigés du mouvement d’atteindre selon une trajectoire définie et des tâches de mouvements libres impliquant les articulations de l’épaule et du coude dans un environnement intégré de réalité virtuelle. À 6 semaines (après l’intervention), aucune changement significatif n’a été noté sur la spasticité du MS telle que mesurée par la Modified Ashworth Scale.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système L-EXOS n’est pas efficace pour réduire la spasticité du MS de patients en phase chronique de récupération post-AVC.
Phase chronique - MEMOS
Une étude quasi-expérimentale (Colombo et al., 2010) a examiné les effets de la rééducation du MS assistée par robot utilisant le système MEMOS sur la cinématique du MS de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients à une rééducation du MS assistée par robot utilisant le dispositif MEMOS (Elbow-shoulder manipulator mechatronic system for motor recovery after stroke). Cette rééducation assistée par robot consiste en une série d’exercices dirigés du mouvement actif et actif-assisté d’atteindre de l’épaule et du coude dans un plan horizontal. À 3 semaines (après l’intervention), une amélioration significative a été relevée sur la dynamique du mouvement des patients (paramètres normalisés de force contrôlée et erreur de force directionnelle).
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système MEMOS est efficace pour améliorer la dynamique du mouvement de patients en phase chronique de récupération post-AVC.
Une étude quasi-expérimentale (Colombo et al., 2010) a examiné les effets de la rééducation du MS assistée par robot utilisant le système MEMOS sur la fonction du MS de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients à une rééducation du MS assistée par robot utilisant le dispositif MEMOS (Elbow-shoulder manipulator mechatronic system for motor recovery after stroke). Cette rééducation assistée par robot consiste en une série d’exercices dirigés du mouvement actif et actif-assisté d’atteindre de l’épaule et du coude dans un plan horizontal. À 3 semaines (après l’intervention), une amélioration significative a été relevée sur la fonction du MS des patients telle que mesurée par la Fugl-Meyer Assessment of Upper Extremity Function et le Motor Status Score.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système MEMOS est efficace pour améliorer la fonction du MS de patients en phase chronique de récupération post-AVC.
Une étude quasi-expérimentale (Colombo et al., 2010) a examiné les effets de la rééducation du MS assistée par robot utilisant le système MEMOS sur la force du MS de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients à une rééducation du MS assistée par robot utilisant le dispositif MEMOS (Elbow-shoulder manipulator mechatronic system for motor recovery after stroke). Cette rééducation assistée par robot consiste en une série d’exercices dirigés du mouvement actif et actif-assisté d’atteindre de l’épaule et du coude dans un plan horizontal. À 3 semaines (après l’intervention), une amélioration significative a été relevée sur la force du MS des patients (mesurée par les indices de co- contraction du biceps brachial/triceps brachial, deltoïde antérieur/postérieur et des grands groupes musculaires pectoraux).
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système MEMOS est efficace pour améliorer la force du MS de patients en phase chronique de récupération post-AVC.
Phase chronique - MIME
Un ECR de haute qualité (Lum et al., 2002) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif MIME (Mirror Image Movement Enabler) sur la cinématique du mouvement d’atteindre de patients en phase chronique de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif MIME, ou la thérapie neuro-développementale habituelle. La rééducation assistée consiste en une série d’exercices dirigés du mouvement d’atteindre de l’avant-bras et l’épaule sous quatre modes d’implication : passif, actif-assisté, actif-contraint et bimanuel. À 2 mois (après l’intervention), une différence significative entre les groupes a été relevée sur la cinématique du mouvement d’atteindre (mouvement d’atteindre avant-latéral et latéral à la hauteur du niveau de la table et de l’épaule ; mouvement d’atteindre avant-médial et avant à la hauteur du niveau de l’épaule), en faveur de la rééducation du MS assistée par robot comparée à la thérapie neuro-développementale habituelle.
Note : Les mesures de la cinématique n’ont pas été documentées à la mi-intervention (1 mois), ni lors du suivi de 6 mois.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation du MS utilisant le dispositif MIME est plus efficace qu’une intervention comparative (ici, la thérapie neuro-développementale habituelle) pour améliorer la cinématique du mouvement d’atteindre de patients en phase chronique de récupération post-AVC.
Un ECR de haute qualité (Lum et al., 2002) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif MIME (Mirror Image Movement Enabler) sur la fonction du MS de patients en phase chronique de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif MIME, ou la thérapie neuro-développementale habituelle. La rééducation assistée consiste en une série d’exercices dirigés du mouvement d’atteindre de l’avant-bras et l’épaule sous quatre modes d’implication : passif, actif-assisté, actif-contraint et bimanuel. À 1 mois (au milieu de l’intervention), et à 2 mois (après l’intervention), une différence significative entre les groupes a été relevée sur la fonction du MS telle que mesurée par la sous-échelle épaule/coude de la Fugl-Meyer Assessment of Upper Extremity Function, en faveur de la rééducation du MS assistée par robot comparée à la thérapie neuro-développementale habituelle.
Note : Aucune différence significative entre les groupes n’a été notée sur la sous-échelle poignet/main de la Fugl-Meyer Assessment of Upper Extremity Function, et ce, pour tous les temps de mesure.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation du MS utilisant le dispositif MIME est plus efficace qu’une intervention comparative (ici, la thérapie neuro-développementale habituelle) pour améliorer la fonction du MS de patients en phase chronique de récupération post-AVC.
Un ECR de haute qualité (Lum et al., 2002) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif MIME (Mirror Image Movement Enabler) sur la force du MS de patients en phase chronique de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif MIME, ou la thérapie neuro-développementale habituelle. La rééducation assistée consiste en une série d’exercices dirigés du mouvement d’atteindre de l’avant-bras et l’épaule sous quatre modes d’implication : passif, actif-assisté, actif-contraint et bimanuel. À 2 mois (après l’intervention), une différence significative entre les groupes a été relevée sur la force du MS (flexion de l’épaule, flexion, extension, abduction et adduction du coude), en faveur de la rééducation du MS assistée par robot comparée à la thérapie neuro-développementale habituelle.
Note : Les mesures de la force du MS n’ont pas été documentées à 1 mois (au milieu de l’intervention), ni lors du suivi de 6 mois.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation du MS utilisant le dispositif MIME est plus efficace qu’une intervention comparative (ici, la thérapie neuro-développementale habituelle) pour améliorer la force du MS de patients en phase chronique de récupération post-AVC.
Indépendance fonctionnelle
Inefficace
1b
Un ECR de haute qualité (Lum et al., 2002) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif MIME (Mirror Image Movement Enabler) sur l’indépendance fonctionnelle de patients en phase chronique de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif MIME, ou la thérapie neuro-développementale habituelle. La rééducation assistée consiste en une série d’exercices dirigés du mouvement d’atteindre de l’avant-bras et l’épaule sous quatre modes d’implication : passif, actif-assisté, actif-contraint et bimanuel. À 1 mois (au milieu de l’intervention), et 2 mois (après l’intervention), aucune différence significative entre les groupes n’a été notée sur l’indépendance fonctionnelle telle qu’évaluée la Mesure de l’indépendance fonctionnelle (MIF) et l’Indice de Barthel. À 6 mois (au moment d’un suivi), tandis que la mesure de l’Indice ne Barthel ne notait toujours pas de différence significative entre les groupes, les résultats de la MIF relevait une différence significative entre les groupes en faveur de la rééducation du MS assistée par robot comparée à la thérapie neuro-développementale habituelle.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation du MS utilisant le dispositif MIME n’est pas plus efficace qu’une intervention comparative (ici, la thérapie neuro-développementale habituelle) pour améliorer l’indépendance fonctionnelle de patients en phase chronique de récupération post-AVC.
Note : Cependant, une différence significative entre les groupes a été relevée sur une mesure de l’indépendance fonctionnelle lors du suivi (6 mois après l’intervention), en faveur de la rééducation du MS assistée par robot comparée à une intervention comparative.
Phase chronique - MIT-Manus
Amplitude articulaire
Inefficace
1b
Un ECR de haute qualité (Volpe et al., 2008) et une étude quasi-expérimentale (Posteraro et al., 2009) ont examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif MIT-Manus sur l’amplitude articulaire de patients en phase chronique de récupération post-AVC.
L’ECR de haute qualité (Volpe et al., 2008) a assigné aléatoirement les patients pour recevoir une rééducation intensive du MS assistée par robot utilisant le dispositif MIT-Manus ou un entraînement sensorimoteur intensif du bras dirigé par un thérapeute. La rééducation assistée par robot consiste en une série d’exercices dirigés actifs et actifs-assistés dans un plan horizontal utilisant le dispositif MIT-Manus (InMotion2). À 6 semaines (après l’intervention), et à 3 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur l’amplitude articulaire des patients telle que mesurée à l’aide une Échelle à 5 points.
L’étude quasi-expérimentale (Posteraro et al., 2009) a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le système MIT-Manus. La rééducation assistée consiste en une série d’exercices dirigés dans un plan horizontal passif, actif et actif-assisté de tâches mettant l’emphase sur les mouvements de l’épaule et du coude. À 6 semaines (après l’intervention), une amélioration significative a été relevée sur l’amplitude articulaire passive de l’épaule et du coude, résultat qui s’est maintenu à 3 mois (au moment d’un suivi) au niveau de l’amplitude articulaire passive de l’épaule.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation du MS utilisant le dispositif MIT-Manus n’est pas plus efficace qu’une intervention comparative (ici, un entraînement intensif du bras) pour améliorer l’amplitude articulaire de patients en phase chronique de récupération post-AVC.
Note : Cependant, il convient de remarquer qu’une étude quasi-expérimentale a relevé une amélioration significative de l’amplitude articulaire passive de l’épaule et du coude suivant une rééducation du MS assistée par robot utilisant le dispositif MIT-Manus.
Bien-être émotionnel
Inefficace
1b
Un ECR de haute qualité (Volpe et al., 2008) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif MIT-Manus sur le bien-être émotionnel de patients en phase chronique de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients pour recevoir une rééducation intensive du MS assistée par robot ou un entraînement sensorimoteur intensif du bras dirigé par un thérapeute. La rééducation assistée consiste en une série d’exercices dirigés actifs et actifs-assistés dans un plan horizontal utilisant le dispositif MIT-Manus (InMotion2). À 6 semaines (après l’intervention), et à 3 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur le bien-être émotionnel des patients tel que mesuré par l’Inventaire de dépression de Beck.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation du MS utilisant le dispositif MIT-Manus n’est pas plus efficace qu’une intervention comparative (ici, un entraînement sensorimoteur intensif du bras) pour améliorer le bien-être émotionnel de patients en phase chronique de récupération post-AVC.
Un ECR de haute qualité (Conroy et al., 2011) et deux études quasi-expérimentales (Zollo et al., 2011; Dipietro et al., 2012) ont examiné les effets de la rééducation du MS assistée par robot utilisant le système MIT-Manus sur la cinématique du MS de patients en phase chronique de récupération post-AVC.
L’ECR de haute qualité (Conroy et al., 2011) a assigné aléatoirement les patients pour recevoir une rééducation intensive du MS assistée par robot consistant en une série d’exercices dirigés du mouvement d’atteindre dans un plan horizontal utilisant le dispositif MIT-Manus ; une rééducation intensive du MS assistée par robot consistant en une série d’exercices dirigés du mouvement d’atteindre dans un plan horizontal et vertical utilisant le dispositif MIT-Manus, ou un entraînement intensif du bras. À 6 semaines (après l’intervention), et à 12 semaines (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur la plupart des mesures de la cinématique du MS (force Z, déviation, vitesse moyenne, pic de vélocité, fluidité et durée du mouvement, ratio de l’ellipse).
Note : Aux deux temps de mesure, une différence significative entre les groupes a été relevée au niveau de la mesure de l’atteinte d’une cible, en faveur des groupes de rééducation intensive du MS assistée par robot comparés à l’entraînement intensif du bras.
La première étude quasi-expérimentale (Zollo et al., 2011) a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le système MIT-Manus (dispositif InMotion2 et InMotion3). La rééducation assistée consiste en une série d’exercices dirigés dans un plan horizontal passif, actif et actif-assisté de tâches mettant l’emphase sur les mouvements de l’épaule, du coude et du poignet. À 12 semaines (après l’intervention), une amélioration significative de la cinématique du MS a été relevée au niveau des indices dynamiques et des indices de planification du mouvement (motion planning).
La seconde étude quasi-expérimentale (Dipietro et al., 2012) a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le système MIT-Manus (dispositif InMotion2). La rééducation assistée consiste en une série de tâches dirigées, point par point, du mouvement de l’épaule et du coude dans un mode passif, actif et actif-assisté. Après 18 séances d’intervention, une amélioration significative a été relevée sur la plupart des mesures de la cinématique du MS (mesures de fluidité, mesures du mouvement et des sous-mouvements).
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation du MS utilisant le dispositif MIT-Manus n’est pas plus efficace qu’une intervention comparative (ici, un entraînement intensif du bras) pour améliorer la cinématique du MS de patients en phase chronique de récupération post-AVC.
Note : Cependant, deux études quasi-expérimentales ont démontré une amélioration significative suivant une rééducation du MS assistée par robot utilisant le système MIT-Manus.
Dislocation de l’épaule
Inefficace
1b
Un ECR de haute qualité (Volpe et al., 2008) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif MIT-Manus sur les incidences de la dislocation de l’épaule de patients en phase chronique de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients pour recevoir une rééducation intensive du MS assistée par robot ou un entraînement sensorimoteur intensif du bras dirigé par un thérapeute. La rééducation assistée consiste en une série d’exercices dirigés actifs et actifs-assistés dans un plan horizontal utilisant le dispositif MIT-Manus (InMotion2). À 6 semaines (après l’intervention), et à 3 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur les incidences de la dislocation de l’épaule des patients.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation du MS utilisant le dispositif MIT-Manus n’est pas plus efficace qu’une intervention comparative (ici, un entraînement sensorimoteur intensif du bras) pour améliorer les incidences de la dislocation de l’épaule de patients en phase chronique de récupération post-AVC.
Note : Le résultat de cette étude indique cependant que la rééducation du MS utilisant le dispositif MIT-Manus n’entraine pas plus d’incidence de dislocation qu’une intervention comparative.
Deux ECR de haute qualité (Volpe et al., 2008; Lo et al., 2010) et une étude quasi-expérimentale (Posteraro et al., 2009) ont examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif MIT-Manus sur la douleur de patients en phase chronique de récupération post-AVC.
Le premier ECR de haute qualité (Volpe et al., 2008) a assigné aléatoirement les patients pour recevoir une rééducation intensive du MS assistée par robot utilisant le dispositif MIT-Manus ou un entraînement sensorimoteur intensif du bras dirigé par un thérapeute. La rééducation assistée par robot consiste en une série d’exercices dirigés actifs et actifs-assistés dans un plan horizontal utilisant le dispositif MIT-Manus (InMotion2). À 6 semaines (après l’intervention). et à 3 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur la douleur des patients telle que mesurée par la sous-échelle Douleur de la Fugl-Meyer Assessment of Upper Extremity Function.
Le second ECR de haute qualité (Lo et al., 2010) a assigné aléatoirement les patients pour recevoir une rééducation intensive du MS assistée par robot utilisant le dispositif MIT-Manus, un entraînement intensif apparié de réadaptation habituelle, ou le programme de soins habituel. La rééducation assistée par robot consiste en quatre modules : un module épaule/coude pour les mouvements horizontaux ; un module antigravitationnel pour les mouvements verticaux ; un module poignet pour la flexion/extension, abduction/adduction, pronation/supination ; et un module pour la préhension de la main dans des mouvements de fermeture et d’ouverture. Après 12 semaines d’intervention, et au moment d’un suivi à 36 semaines, aucune différence significative entre les groupes n’a été notée sur la douleur mesurée à l’aide d’une Échelle visuelle analogue.
L’étude quasi-expérimentale (Posteraro et al., 2009) a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le système MIT-Manus. La rééducation assistée consiste en une série d’exercices dirigés dans un plan horizontal passif, actif et actif-assisté de tâches mettant l’emphase sur les mouvements de l’épaule et du coude. À 6 semaines (après l’intervention), et à 3 mois (au moment d’un suivi), aucun changement significatif n’a été noté sur la douleur des patients mesurée à l’aide d’une Échelle de cotation verbale à 4 points.
Conclusion : Des données probantes modérées (niveau 1b), provenant de deux ECR de haute qualité et d’une étude quasi-expérimentale, indiquent que la rééducation du MS utilisant le dispositif MIT-Manus n’est pas plus efficace que des interventions comparatives (ici, un entraînement intensif du bras, un entraînement intensif apparié de réadaptation habituelle, ou le programme de soins habituel) pour réduire la douleur de patients en phase chronique de récupération post-AVC.
Note : Le résultat de ces études indique également que la rééducation du MS utilisant le dispositif MIT-Manus n’entraine pas plus de douleur que les interventions comparatives.
Fonction du MS
Inefficace
1a
Trois ECR de haute qualité (Volpe et al., 2008 ; Lo et al., 2010 et Conroy et al., 2011) et trois études quasi-expérimentales (MacClellan et al., 2005 ; Posteraro et al., 2009 et Zollo et al., 2011) ont examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif MIT-Manus sur la fonction du MS de patients en phase chronique de récupération post-AVC.
Le premier ECR de haute qualité (Volpe et al., 2008) a assigné aléatoirement les patients pour recevoir une rééducation intensive du MS assistée par robot utilisant le dispositif MIT-Manus ou un entraînement sensorimoteur intensif du bras dirigé par un thérapeute. La rééducation assistée par robot consiste en une série d’exercices dirigés actifs et actifs-assistés dans un plan horizontal utilisant le dispositif MIT-Manus (InMotion2). À 6 semaines (après l’intervention), et à 3 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur la fonction du MS des patients telle que mesurée par les sous-échelles épaule/coude et poignet/main de la Fugl-Meyer Assessment of Upper Extremity Function.
Le second ECR de haute qualité (Lo et al., 2010) a assigné aléatoirement les patients pour recevoir une rééducation intensive du MS assistée par robot utilisant le dispositif MIT-Manus, un entraînement intensif apparié de réadaptation habituelle, ou le programme de soins habituels. La rééducation assistée par robot consiste en quatre modules : un module épaule/coude pour les mouvements horizontaux ; un module antigravitationnel pour les mouvements verticaux ; un module poignet pour la flexion/extension, abduction/adduction, pronation/supination ; et un module pour la préhension de la main dans des mouvements de fermeture et d’ouverture. À 12 semaines (après l’intervention), aucune différence significative entre les groupes n’a été notée sur la fonction du MS des patients telle que mesurée par la Fugl-Meyer Assessment of Upper Extremity Function et le Wolf Motor Function Test. Cependant, à 36 semaines (au moment d’un suivi), une différence significative entre les groupes a été relevée sur toutes les mesures de la fonction du MS, en faveur de la rééducation intensive du MS assistée par robot comparée au programme de soins habituel.
Le troisième ECR de haute qualité (Conroy et al., 2011) a assigné aléatoirement les patients pour recevoir une rééducation intensive du MS assistée par robot consistant en une série d’exercices dirigés du mouvement d’atteindre dans un plan horizontal utilisant le dispositif MIT-Manus ; une rééducation intensive du MS assistée par robot consistant en une série d’exercices dirigés du mouvement d’atteindre dans un plan horizontal et vertical utilisant le dispositif MIT-Manus, ou un entraînement intensif du bras. À 6 semaines (après l’intervention), et à 12 semaines (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur la fonction du MS telle que mesurée par la Fugl-Meyer Assessment of Upper Extremity Function et le Wolf Motor Function Test.
La première étude quasi-expérimentale (MacClellan et al., 2005) a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le système MIT-Manus (dispositif InMotion2). La rééducation assistée consiste en une série d’exercices dirigés dans un plan horizontal passif, actif et actif-assisté de tâches mettant l’emphase sur les mouvements de l’épaule, du coude et du poignet. À 4 semaines (après l’intervention), et à 3 mois (au moment d’un suivi), l’analyse des patients présentant un niveau se sévérité de l’AVC modéré (score de la FMA > 15) n’a démontré aucune amélioration significative sur la majorité des mesure de la fonction du MS (le score total et les sous-échelles épaule/coude et poignet/main de la Fugl-Meyer Assessment of Upper Extremity Function, les sous-échelles épaule/coude et poignet/main de la Motor Status Scale, et sur la sous-échelle Performance Time du Wolf Motor Function Test). Cependant, ce sous-groupe a démontré une amélioration significative sur la sous-échelle Functional Ability du Wolf Motor Function Test (seulement après l’intervention), de même que sur la sous-échelle épaule/coude de la Fugl-Meyer Assessment of Upper Extremity Function (seulement au moment du suivi). L’analyse des patients présentant un niveau de sévérité élevé (score de la FMA ≤ 15) a démontré une amélioration significative sur le score total et la sous-échelle épaule/coude de la Fugl-Meyer Assessment of Upper Extremity Function (seulement après l’intervention), mais aucune amélioration significative, sur aucune des mesures, n’a été notée au moment du suivi.
La seconde étude quasi-expérimentale (Posteraro et al., 2009) a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le système MIT-Manus. La rééducation assistée consiste en une série d’exercices dirigés dans un plan horizontal passif, actif et actif-assisté de tâches mettant l’emphase sur les mouvements de l’épaule et du coude. À 6 semaines (après l’intervention), une amélioration significative a été relevée sur la fonction du MS telle que mesurée par la sous-échelle épaule/coude de la Motor Status Scale, résultat qui ne s’est cependant pas maintenu à 3 mois (au moment d’un suivi).
La troisième étude quasi-expérimentale (Zollo et al., 2011) a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le système MIT-Manus (dispositif InMotion2 et InMotion3). La rééducation assistée consiste en une série d’exercices dirigés dans un plan horizontal passif, actif et actif-assisté de tâches mettant l’emphase sur les mouvements de l’épaule, du coude et du poignet. À 12 semaines (après l’intervention), une amélioration significative a été relevée sur la fonction du MS telle que mesurée par la Fugl-Meyer Assessment of Upper Extremity Function.
Conclusion : De fortes données probantes (niveau 1a), provenant de trois ECR de haute qualité, indiquent que la rééducation du MS utilisant le dispositif MIT-Manus n’est pas plus efficace que des interventions comparatives (ici, un entraînement sensorimoteur intensif du bras, un entraînement intensif apparié de réadaptation habituelle, ou un entraînement intensif du bras) pour améliorer la fonction du MS de patients en phase chronique de récupération post-AVC.
Note : Cependant, un ECR de haute qualité a relevé, au moment de son suivi de 36 semaines, que la rééducation du MS utilisant le dispositif MIT-Manus est plus efficace que le programme de soins habituel. De plus, il convient de remarquer que trois études quasi-expérimentales ont relevé une amélioration significative sur la fonction du MS suivant une rééducation du MS assistée par robot utilisant le dispositif MIT-Manus.
Un ECR de haute qualité (Volpe et al., 2008) et deux études quasi-expérimentales (MacClellan et al., 2005; Zollo et al., 2011) ont examiné les effets de la rééducation du MS assistée par robot utilisant le système MIT-Manus sur la force du MS de patients en phase chronique de récupération post-AVC.
L’ECR de haute qualité (Volpe et al., 2008) a assigné aléatoirement les patients pour recevoir une rééducation intensive du MS assistée par robot utilisant le dispositif MIT-Manus ou un entraînement sensorimoteur intensif du bras dirigé par un thérapeute. La rééducation assistée par robot consiste en une série d’exercices dirigés actifs et actifs-assistés dans un plan horizontal utilisant le dispositif MIT-Manus (InMotion2). À 3 semaines (au milieu de l’intervention), à 6 semaines (après l’intervention), et à 3 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur la force de l’épaule et du coude telle que mesurée par la sous-échelle Force motrice du Medical Research Concil (MRC).
La première étude quasi-expérimentale (MacClellan et al., 2005) a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le système MIT-Manus (dispositif InMotion2). La rééducation assistée consiste en une série d’exercices dirigés dans un plan horizontal passif, actif et actif-assisté de tâches mettant l’emphase sur les mouvements de l’épaule, du coude et du poignet. À 4 semaines (après l’intervention), une amélioration significative a été relvée sur la force du MS (mesurée par le Motor Power Assessment) pour les patients présentant un niveau de sévérité élevé (score de la Fugl-Meyer Assessment of Upper Extremity Function ≤ 15), cependant ce résultat ne s’est pas avéré significatif à 3 mois (au moment d’un suivi). Aucune amélioration significative n’a été notée sur la force du MS pour les patients ayant un niveau se sévérité modéré (score de la FMA > 15), et ce à aucun des temps de mesure.
La seconde étude quasi-expérimentale (Zollo et al., 2011) a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le système MIT-Manus (dispositif InMotion2 et InMotion3). La rééducation assistée consiste en une série d’exercices dirigés dans un plan horizontal passif, actif et actif-assisté de tâches mettant l’emphase sur les mouvements de l’épaule, du coude et du poignet. À 12 semaines (après l’intervention), une amélioration significative a été relevée sur la force du MS telle que mesurée par la Motor Power Scale.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation du MS utilisant le dispositif MIT-Manus n’est pas plus efficace qu’une intervention comparative (ici, un entraînement sensorimoteur intensif du bras) pour améliorer la force du MS de patients en phase chronique de récupération post-AVC.
Note : Cependant, deux études quasi-expérimentales ont relevé une amélioration significative suivant une rééducation du MS assistée par robot utilisant le système MIT-Manus.
Sévérité de l'AVC
Contradictoire
4
Trois ECR de haute qualité (Volpe et al., 2008; Lo et al., 2010 et Conroy et al., 2011) ont examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif MIT-Manus sur les mesures de sévérité de l’AVC de patients en phase chronique de récupération post-AVC.
Le premier ECR de haute qualité (Volpe et al., 2008) a assigné aléatoirement les patients pour recevoir une rééducation intensive du MS assistée par robot utilisant le dispositif MIT-Manus ou un entraînement sensorimoteur intensif du bras dirigé par un thérapeute. La rééducation assistée par robot consiste en une série d’exercices dirigés actifs et actifs-assistés dans un plan horizontal utilisant le dispositif MIT-Manus (InMotion2). À 6 semaines (après l’intervention) et à 3 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur la sévérité de l’AVC des patients telle que mesurée par la Stroke Impact Scale et la National Institute of Health Stroke Scale.
Le second ECR de haute qualité (Lo et al., 2010) a assigné aléatoirement les patients pour recevoir une rééducation intensive du MS assistée par robot utilisant le dispositif MIT-Manus, un entraînement intensif apparié de réadaptation habituelle, ou le programme de soins habituel. La rééducation assistée par robot consiste en quatre modules : un module épaule/coude pour les mouvements horizontaux ; un module antigravitationnel pour les mouvements verticaux ; un module poignet pour la flexion/extension, abduction/adduction, pronation/supination ; et un module pour la préhension de la main dans des mouvements de fermeture et d’ouverture. À 12 semaines (après l’intervention) et à 36 semaines (au moment d’un suivi), une différence significative entre les groupes a été relevée sur la sévérité de l’AVC des patients telle que mesurée par la Stroke Impact Scale, en faveur du groupe de rééducation intensive du MS assistée par robot comparé au programme de soins habituel. Aucune différence significative entre les groupes n’a été notée entre la rééducation intensive du MS assistée par robot et l’entraînement intensif apparié de réadaptation habituelle.
Le troisième ECR de haute qualité (Conroy et al., 2011) a assigné aléatoirement les patients pour recevoir une rééducation intensive du MS assistée par robot consistant en une série d’exercices dirigés du mouvement d’atteindre dans un plan horizontal utilisant le dispositif MIT-Manus ; une rééducation intensive du MS assistée par robot consistant en une série d’exercices dirigés du mouvement d’atteindre dans un plan horizontal et vertical utilisant le dispositif MIT-Manus, ou un entraînement intensif du bras. À 6 semaines (après l’intervention), une différence significative entre les groupes a été relevée sur une mesure de sévérité de l’AVC (sous-échelle Activités de la vie quotidienne – AVQ- de la Stroke Impact Scale), en faveur de la rééducation intensive du MS assistée par robot consistant en une série d’exercices dirigés du mouvement d’atteindre dans un plan horizontal et vertical comparée à l’entraînement intensif du bras. Toujours à 6 semaines, aucune différence significative entre les groupes n’a été notée sur les autres mesures de sévérité de l’AVC (sous-échelles Main et Mobilité de la Stroke Impact Scale) ; tandis qu’à 12 semaines (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée, sur aucune des mesures de sévérité de l’AVC.
Note : À 6 semaines (après l’intervention), une différence significative entre les groupes a également été relevée avec un sous-groupe de patients présentant un niveau de sévérité élevé (score de la FMA ≤ 25), en faveur de la rééducation intensive du MS assistée par robot consistant en une série d’exercices dirigés du mouvement d’atteindre dans un plan horizontal et vertical, comparée à l’entraînement intensif du bras. Cette différence ne s’est toutefois pas maintenue à 12 semaines (au moment d’un suivi).
Conclusion : Des données probantes contradictoires (niveau 4) ont été relevées au sujet de l’effet de la rééducation du MS assistée par robot utilisant le dispositif MIT-Manus sur les mesures de sévérité de l’AVC de patients en phase chronique de récupération post-AVC. Tandis qu’un premier ECR de haute qualité indique que la rééducation du MS assistée par robot utilisant le système MIT-Manus n’est pas plus efficace qu’un entraînement sensorimoteur intensif du bras pour influer sur les mesures de sévérité de l’AVC ; un second ECR de haute qualité a indiqué que la rééducation du MS assistée par robot utilisant le dispositif MIT-Manus est plus efficace que le programme de soins habituel pour influencer les mesures de sévérité de l’AVC. Finalement, un troisième ECR de haute qualité a indiqué que la rééducation du MS assistée par robot utilisant le système MIT-Manus est plus efficace qu’un entraînement intensif du bras pour améliorer les symptômes de l’AVC relatifs aux Activités de la vie quotidienne, mais pas quant aux fonctions de la main ou à la mobilité.
Deux ECR de haute qualité (Volpe et al., 2008; Lo et al., 2010) et une étude quasi-expérimentale (Posteraro et al., 2009) ont examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif MIT-Manus sur la spasticité du MS de patients en phase chronique de récupération post-AVC.
Le premier ECR de haute qualité (Volpe et al., 2008) a assigné aléatoirement les patients pour recevoir une rééducation intensive du MS assistée par robot utilisant le dispositif MIT-Manus ou un entraînement sensorimoteur intensif du bras dirigé par un thérapeute. La rééducation assistée par robot consiste en une série d’exercices dirigés actifs et actifs-assistés dans un plan horizontal utilisant le dispositif MIT-Manus (InMotion2). À 6 semaines (après l’intervention) et à 3 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur la spasticité du MS des patients telle que mesurée par la Modified Ashworth Scale.
Le second ECR de haute qualité (Lo et al., 2010) a assigné aléatoirement les patients pour recevoir une rééducation intensive du MS assistée par robot utilisant le dispositif MIT-Manus, un entraînement intensif apparié de réadaptation habituelle, ou le programme de soins habituels. La rééducation assistée par robot consiste en quatre modules : un module épaule/coude pour les mouvements horizontaux ; un module antigravitationnel pour les mouvements verticaux ; un module poignet pour la flexion/extension, abduction/adduction, pronation/supination ; et un module pour la préhension de la main dans des mouvements de fermeture et d’ouverture. À 12 semaines (après l’intervention), et à 36 semaines (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur la spasticité du MS des patients telle que mesurée par la Modified Ashworth Scale.
L’étude quasi-expérimentale (Posteraro et al., 2009) a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le système MIT-Manus. La rééducation assistée consiste en une série d’exercices dirigés dans un plan horizontal passif, actif et actif-assisté de tâches mettant l’emphase sur les mouvements de l’épaule et du coude. À 6 semaines (après l’intervention), une réduction significative de la spasticité de l’épaule a été relevée, résultat qui ne s’est cependant pas maintenu à 3 mois (au moment d’un suivi). Aucun changement significatif n’a été noté sur la spasticité du coude, telle qu’évalué par la Modified Ashworth Scale, et ce, à aucun des temps de mesure.
Conclusion : De fortes données probantes (niveau 1a), provenant de deux ECR de haute qualité, indiquent que la rééducation du MS utilisant le dispositif MIT-Manus n’est pas plus efficace que des interventions comparatives (ici, un entraînement intensif du bras, un entraînement intensif apparié de réadaptation habituelle, ou le programme de soins habituel) pour réduire la spasticité du MS de patients en phase chronique de récupération post-AVC.
Note : Cependant, il convient de remarquer qu’une étude quasi-expérimentale a relevé une réduction significative, à court terme, sur la spasticité de l’épaule, suivant une rééducation du MS assistée par robot utilisant le dispositif MIT-Manus.
Phase chronique - Pneumatic Glove
Amplitude articulaire
Inefficace
2a
Un ECR de qualité acceptable (Fischer et al., 2007) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif Pneumatic Glove sur l’amplitude articulaire du MS de patients en phase chronique de récupération post-AVC. Cet ECR de qualité acceptable a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant une orthèse pneumatique avec une assistance automatisée de l’extension des doigts, une orthèse câblée avec auto-assistance de l’extension des doigts, ou aucune orthèse. La rééducation assistée par robot consiste en une série de tâches fonctionnelles de préhension/relâchement dans un environnement entremêlant des objets virtuels et réels. À 6 semaines (après l’intervention), et à 1 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur l’amplitude articulaire de la main (extension active de l’articulation métacarpo-phalangienne).
Conclusion : Des données probantes limitées (niveau 2a), provenant d’un ECR de qualité acceptable, indiquent que la rééducation du MS utilisant le dispositif Pneumatic Glove n’est pas plus efficace que des interventions comparatives (ici, un entraînement du MS avec une orthèse câblée, ou aucune orthèse) pour améliorer l’amplitude articulaire de la main de patients en phase chronique de récupération post-AVC.
Un ECR de qualité acceptable (Fischer et al., 2007) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif Pneumatic Glove sur la cinématique du MS de patients en phase chronique de récupération post-AVC. Cet ECR de qualité acceptable a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant une orthèse pneumatique avec une assistance automatisée de l’extension des doigts, une orthèse câblée avec auto-assistance de l’extension des doigts, ou aucune orthèse. La rééducation assistée par robot consiste en une série de tâches fonctionnelles de préhension/relâchement dans un environnement entremêlant des objets virtuels et réels. À 6 semaines (après l’intervention), et à 1 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur la cinématique de la main (pic de vélocité et la force de flexion/extension isométrique de l’articulation métacarpo-phalangienne).
Conclusion : Des données probantes limitées (niveau 2a), provenant d’un ECR de qualité acceptable, indiquent que la rééducation du MS utilisant le dispositif Pneumatic Glove n’est pas plus efficace que des interventions comparatives (ici, un entraînement du MS avec une orthèse câblée, ou aucune orthèse) pour améliorer la cinématique de la main de patients en phase chronique de récupération post-AVC.
Un ECR de haute qualité (Connelly et al., 2010) et un ECR de qualité acceptable (Fischer et al., 2007) ont examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif Pneumatic Glove sur la dextérité de patients en phase chronique de récupération post-AVC.
L’ECR de haute qualité (Connelly et al., 2010) a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif Pneumatic Glove ou un entraînement du MS sans assistance robotisée. La rééducation assistée par robot consiste en une série de tâches fonctionnelles de préhension/relâchement dans un environnement entremêlant des objets virtuels et réels. À 6 semaines (après l’intervention) et à 1 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur la dextérité telle que mesurée par le Box and Blocks Test.
L’ECR de qualité acceptable (Fischer et al., 2007) a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant une orthèse pneumatique avec une assistance automatisée de l’extension des doigts, une orthèse câblée avec auto-assistance de l’extension des doigts, ou aucune orthèse. La rééducation assistée par robot consiste en une série de tâches fonctionnelles de préhension/relâchement dans un environnement entremêlant des objets virtuels et réels. À 6 semaines (après l’intervention), et à 1 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur la dextérité telle que mesurée par le Box and Blocks Test.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité et d’un ECR de qualité acceptable, indiquent que la rééducation du MS utilisant le dispositif Pneumatic Glove n’est pas plus efficace que des interventions comparatives (ici, un entraînement du MS sans assistance robotisée, un entraînement du MS avec une orthèse câblée, ou aucune orthèse) pour améliorer la dextérité de patients en phase chronique de récupération post-AVC.
Fonction du MS
Inefficace
1b
Un ECR de haute qualité (Connelly et al., 2010) et un ECR de qualité acceptable (Fischer et al., 2007) ont examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif Pneumatic Glove sur la fonction du MS de patients en phase chronique de récupération post-AVC.
L’ECR de haute qualité (Connelly et al., 2010) a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif Pneumatic Glove ou un entraînement du MS sans assistance robotisée. La rééducation assistée par robot consiste en une série de tâches fonctionnelles de préhension/relâchement dans un environnement entremêlant des objets virtuels et réels. À 6 semaines (après l’intervention), et à 1 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur la fonction du MS telle que mesurée par le score total et la sous-échelle main/poignet du Fugl-Meyer Assessment of Upper Extremity Function.
L’ECR de qualité acceptable (Fischer et al., 2007) a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant une orthèse pneumatique avec une assistance automatisée de l’extension des doigts, une orthèse câblée avec auto-assistance de l’extension des doigts, ou aucune orthèse. La rééducation assistée par robot consiste en une série de tâches fonctionnelles de préhension/relâchement dans un environnement entremêlant des objets virtuels et réels. À 6 semaines (après l’intervention), et à 1 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur la fonction du MS telle que mesurée par le time score du Wolf Motor Function Test, la Fugl-Meyer Assessment of the Upper Extremity et le Rancho Los Amigos Functional Test of the Hemiparetic Upper Extremity.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité et d’un ECR de qualité acceptable, indiquent que la rééducation du MS utilisant le dispositif Pneumatic Glove n’est pas plus efficace que des interventions comparatives (ici, un entraînement du MS sans assistance robotisée, un entraînement du MS avec une orthèse câblée, ou aucune orthèse) pour améliorer la fonction du MS de patients en phase chronique de récupération post-AVC.
Force de la pince et de la préhension
Inefficace
1b
Un ECR de haute qualité (Connelly et al., 2010) et un ECR de qualité acceptable (Fischer et al., 2007) ont examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif Pneumatic Glove sur la force de la pince et de la préhension de patients en phase chronique de récupération post-AVC.
L’ECR de haute qualité (Connelly et al., 2010) a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif Pneumatic Glove ou un entraînement du MS sans assistance robotisée. La rééducation assistée par robot consiste en une série de tâches fonctionnelles de préhension/relâchement dans un environnement entremêlant des objets virtuels et réels. À 6 semaines (après l’intervention), et à 1 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur la force latérale ou palmaire de la pince et de la préhension.
L’ECR de qualité acceptable (Fischer et al., 2007) a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant une orthèse pneumatique avec une assistance automatisée de l’extension des doigts, une orthèse câblée avec auto-assistance de l’extension des doigts, ou aucune orthèse. La rééducation assistée par robot consiste en une série de tâches fonctionnelles de préhension/relâchement dans un environnement entremêlant des objets virtuels et réels. À 6 semaines (après l’intervention), et à 1 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur la force de préhension mesurée à l’aide d’un dynamomètre.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité et d’un ECR de qualité acceptable, indiquent que la rééducation du MS utilisant le dispositif Pneumatic Glove n’est pas plus efficace que des interventions comparatives (ici, un entraînement du MS sans assistance robotisée, un entraînement du MS avec une orthèse câblée, ou aucune orthèse) pour améliorer la force de la pince et de la préhension de patients en phase chronique de récupération post-AVC.
Un ECR de qualité acceptable (Fischer et al., 2007) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif Pneumatic Glove sur la spasticité du MS de patients en phase chronique de récupération post-AVC. Cet ECR de qualité acceptable a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant une orthèse pneumatique avec une assistance automatisée de l’extension des doigts, une orthèse câblée avec auto-assistance de l’extension des doigts, ou aucune orthèse. La rééducation assistée par robot consiste en une série de tâches fonctionnelles de préhension/relâchement dans un environnement entremêlant des objets virtuels et réels. À 6 semaines (après l’intervention), et à 1 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur la spasticité de la main (articulation métacarpo-phalangienne).
Conclusion : Des données probantes limitées (niveau 2a), provenant d’un ECR de qualité acceptable, indiquent que la rééducation du MS utilisant le dispositif Pneumatic Glove n’est pas plus efficace que des interventions comparatives (ici, un entraînement du MS avec une orthèse câblée, ou aucune orthèse) pour améliorer la spasticité de la main de patients en phase chronique de récupération post-AVC.
Chronic phase - ReoGo
Une étude quasi-expérimentale (Bovolenta et al., 2011) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif ReoGo sur la dextérité de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif ReoGo. La rééducation assistée consiste en une série d’exercices dirigés qui simulent les mouvements d’atteindre passifs et actifs du coude et de l’épaule parétiques. À 4 semaines (après l’intervention), et à 1 mois (au moment d’un suivi), une amélioration significative a été relevée sur la dextérité des patients telle que mesurée par le Box and Block Test.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système ReoGo est efficace pour améliorer la dextérité de patients en phase chronique de récupération post-AVC.
Une étude quasi-expérimentale (Bovolenta et al., 2011) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif ReoGo sur la douleur au MS de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif ReoGo. La rééducation assistée consiste en une série d’exercices dirigés qui simulent les mouvements d’atteindre passifs et actifs du coude et de l’épaule parétiques. À 4 semaines (après l’intervention), aucun changement significatif n’a été noté sur la douleur au MS telle que mesurée par une Échelle visuelle analogue, cependant, à 1 mois (au moment d’un suivi), une amélioration significative a été relevée sur la douleur au MS.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système ReoGo n’est pas efficace, à court terme, pour améliorer la mobilité de patients en phase chronique de récupération post-AVC.
Note : Cependant, une amélioration significative a été relevée au moment du suivi.
Une étude quasi-expérimentale (Bovolenta et al., 2011) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif ReoGo sur la fonction du MS de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif ReoGo. La rééducation assistée consiste en une série d’exercices dirigés qui simulent les mouvements d’atteindre passifs et actifs du coude et de l’épaule parétiques. À 4 semaines (après l’intervention), et à 1 mois (au moment d’un suivi), une amélioration significative a été relevée sur la fonction du MS des patients telle que mesurée par la Fugl-Meyer Assessment of the Upper Extremity et le Frenchay Arm Test.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système ReoGo est efficace pour améliorer la fonction du MS de patients en phase chronique de récupération post-AVC.
Une étude quasi-expérimentale (Bovolenta et al., 2011) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif ReoGo sur la force musculaire du MS de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif ReoGo. La rééducation assistée consiste en une série d’exercices dirigés qui simulent les mouvements d’atteindre passifs et actifs du coude et de l’épaule parétiques. À 4 semaines (après l’intervention), une amélioration significative a été relevée sur la force musculaire du trapèze, du deltoïde, du pectoral majeur, du biceps, du rotateur interne et grand dorsal des patients, telle que mesurée par la sous-échelle Force motrice du Medical Research Council (MRC). À 1 mois (au moment d’un suivi), ce résultat est demeuré significatif pour l’ensemble de ces muscles, et une amélioration significative a été relevée au niveau du triceps et du fléchisseur/extenseur du poignet.
Note : Après l’intervention, aucune amélioration significative n’a été notée sur la force du triceps, du rotateur externe et du fléchisseur/extenseur du poignet. Au moment du suivi, ce résultat est demeuré non-significatif au niveau de la force des muscles du rotateur externe.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système ReoGo est efficace pour améliorer la force musculaire de patients en phase chronique de récupération post-AVC.
Indépendance fonctionnelle
Efficace
2b
Une étude quasi-expérimentale (Bovolenta et al., 2011) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif ReoGo sur l’indépendance fonctionnelle de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif ReoGo. La rééducation assistée consiste en une série d’exercices dirigés qui simulent les mouvements d’atteindre passifs et actifs du coude et de l’épaule parétiques. À 4 semaines (après l’intervention), et à 1 mois (au moment d’un suivi), une amélioration significative a été relevée sur l’indépendance fonctionnelle des patients telle que mesurée par la sous-échelle Motricité de la Mesure de l’indépendance fonctionnelle.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système ReoGo est efficace pour améliorer l’indépendance fonctionnelle de patients en phase chronique de récupération post-AVC.
Une étude quasi-expérimentale (Bovolenta et al., 2011) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif ReoGo sur la mobilité de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif ReoGo. La rééducation assistée consiste en une série d’exercices dirigés qui simulent les mouvements d’atteindre passifs et actifs du coude et de l’épaule parétiques. À 4 semaines (après l’intervention), et à 1 mois (au moment d’un suivi), une amélioration significative a été relevée sur la mobilité des patients telle que mesurée par le Time Up and Go Test.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système ReoGo est efficace pour améliorer la mobilité de patients en phase chronique de récupération post-AVC.
Qualité de vie
Inefficace
2b
Une étude quasi-expérimentale (Bovolenta et al., 2011) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif ReoGo sur la qualité de vie de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif ReoGo. La rééducation assistée consiste en une série d’exercices dirigés qui simulent les mouvements d’atteindre passifs et actifs du coude et de l’épaule parétiques. À 1 mois (au moment d’un suivi), aucun changement significatif n’a été noté sur la qualité de vie des patients telle que mesurée par l’Euro-QoL.
Note : La qualité de vie n’a pas été mesurée à 4 semaines, immédiatement après l’intervention.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système ReoGo n’est pas efficace pour améliorer la qualité de vie de patients en phase chronique de récupération post-AVC.
Une étude quasi-expérimentale (Bovolenta et al., 2011) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif ReoGo sur la satisfaction de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif ReoGo. La rééducation assistée consiste en une série d’exercices dirigés qui simulent les mouvements d’atteindre passifs et actifs du coude et de l’épaule parétiques. À 4 semaines (après l’intervention), aucun changement significatif n’a été noté sur la satisfaction des patients telle que mesurée par une Échelle visuelle analogue.
Note : La satisfaction n’a pas été mesurée à 1 mois (au moment d’un suivi).
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système ReoGo n’est pas efficace pour améliorer la satisfaction de patients en phase chronique de récupération post-AVC.
Une étude quasi-expérimentale (Bovolenta et al., 2011) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif ReoGo sur la spasticité du MS de patients en phase chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif ReoGo. La rééducation assistée consiste en une série d’exercices dirigés qui simulent les mouvements d’atteindre passifs et actifs du coude et de l’épaule parétiques. À 4 semaines (après l’intervention), et à 1 mois (au moment d’un suivi), aucun changement significatif n’a été noté sur la spasticité de l’épaule et du poignet telle que mesurée par l’Ashworth Scale. Cependant, aux deux temps de mesure, une amélioration significative a été relevée sur la spasticité du coude.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système ReoGo est efficace pour réduire la spasticité du coude (mais pas celle de l’épaule et du poignet) de patients en phase chronique de récupération post-AVC.
Phase chronique - REHAROB
Amplitude articulaire
Efficace
2b
Un ECR de faible qualité (Fazekas et al., 2007) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif REHAROB sur l’amplitude articulaire du MS de patients en phase chronique de récupération post-AVC. Cet ECR de faible qualité a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif REHAROB ou un entraînement du MS sans assistance robotisée. La physiothérapie assistée par robot consiste en une série d’exercices de l’épaule et du coude réalisés lentement, à vitesse constante, avec un nombre élevé de répétitions. À 4 semaines (après l’intervention), bien qu’aucun des groupes n’ait démontré d’amélioration significative au niveau de l’amplitude articulaire de l’épaule, les deux groupe ont démontré une amélioration significative au niveau de l’amplitude articulaire du coude (telle que mesurée par la sous-échelle épaule/coude de la Fugl-Meyer Assessment of Upper Extremity).
Note : La différence entre les groupes n’a pas été documentée.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’un ECR de faible qualité, indiquent que la rééducation du MS assistée par robot utilisant le système REHAROB est efficace pour améliorer l’amplitude articulaire du coude (mais pas celle de l’épaule) de patients en phase chronique de récupération post-AVC.
Un ECR de faible qualité (Fazekas et al., 2007) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif REHAROB sur la fonction du MS de patients en phase chronique de récupération post-AVC. Cet ECR de faible qualité a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif REHAROB ou un entraînement du MS sans assistance robotisée. La physiothérapie assistée par robot consiste en une série d’exercices de l’épaule et du coude réalisés lentement, à vitesse constante, avec un nombre élevé de répétitions. À 4 semaines (après l’intervention), les deux groupe ont démontré une amélioration significative de la fonction du MS telle que mesurée par la sous-échelle épaule/coude de la Fugl-Meyer Assessment of the Upper Extremity Function et les résultats de la mesure du bras de la Rivermead Motor Assessment.
Note : La différence entre les groupes n’a pas été documentée.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’un ECR de faible qualité, indiquent que la rééducation du MS assistée par robot utilisant le système REHAROB est efficace pour améliorer la fonction du MS de patients en phase chronique de récupération post-AVC.
Indépendance fonctionnelle
Efficace
2b
Un ECR de faible qualité (Fazekas et al., 2007) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif REHAROB sur l’indépendance fonctionnelle de patients en phase chronique de récupération post-AVC. Cet ECR de faible qualité a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif REHAROB ou un entraînement du MS sans assistance robotisée. La physiothérapie assistée par robot consiste en une série d’exercices de l’épaule et du coude réalisés lentement, à vitesse constante, avec un nombre élevé de répétitions. À 4 semaines (après l’ntervention), les deux groupe ont démontré une amélioration significative de l’indépendance fonctionnelle telle que mesurée par la sous-échelle Soins personnels de le Mesure de l’indépendance fonctionnelle.
Note : La différence entre les groupes n’a pas été documentée.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’un ECR de faible qualité, indiquent que la rééducation du MS assistée par robot utilisant le système REHAROB est efficace pour améliorer l’indépendance fonctionnelle de patients en phase chronique de récupération post-AVC.
Un ECR de faible qualité (Fazekas et al., 2007) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif REHAROB sur la spasticité du MS de patients en phase chronique de récupération post-AVC. Cet ECR de faible qualité a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif REHAROB ou un entraînement du MS sans assistance robotisée. La physiothérapie assistée par robot consiste en une série d’exercices de l’épaule et du coude réalisés lentement, à vitesse constante, avec un nombre élevé de répétitions. Après 4 semaines d’intervention, les patients ayant reçu la rééducation du MS assistée par robot ont démontré une réduction significative au niveau de la spasticité des abducteurs de l’épaule et des fléchisseurs du coude (telle que mesurée par la Modified Ashworth Scale), amélioration significative qui n’a pas été observée au niveau de la spasticité du MS dans le groupe témoin.
Note : La différence entre les groupes n’a pas été documentée.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’un ECR de faible qualité, indiquent que la rééducation du MS assistée par robot utilisant le système REHAROB est efficace pour réduire la spasticité du MS de patients en phase chronique de récupération post-AVC.
Phase chronique - T-WREX / Pneu-WREX
Activité motrice du MS
Inefficace
1b
Un ECR de haute qualité (Reinkensmeyer et al., 2012) et un ECR de qualité acceptable (Housman et al., 2009) ont examiné les effets de la rééducation du MS assistée par robot utilisant le système T-WREX (Therapy Wilmington Robotic Exoskeleton) ou Pneu-WREX sur l’activité motrice du MS de patients en phase chronique de récupération post-AVC.
L’ECR de haute qualité (Reinkensmeyer et al., 2012) a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif Pneu-WREX ou la thérapie habituelle sur table. Tous les patients ont été exposés à l’autre intervention 30 minutes par semaine, par conséquent, chaque groupe a reçu, pour 84% du temps d’intervention, la thérapie à laquelle il était initialement assigné, et 16 % du temps à l’autre thérapie. Le dispositif assisté par robot Pneu-WREX consiste en une série d’exercices horizontaux de l’épaule (abduction/adduction et flexion/extension), de même que par des mouvements avant/arrière et des tâches fonctionnelles exécutés dans un environnement 3D. De 8 à 9 semaines (après l’intervention), et à 6 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur l’activité motrice du MS des patients telle que mesurée par les sous-échelles Quantité d’utilisation et Qualité du mouvement du Motor Activity Log.
L’ECR de qualité acceptable (Housman et al., 2009) a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif T-WREX ou la réadaptation habituelle. La rééducation assistée par robot utilise une orthèse passive offrant un soutien au bras contre la gravité lors de l’exécution d’exercices fonctionnels en 3D dans un environnement de réalité virtuelle. De 8 à 9 semaines (après l’intervention), et à 6 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur l’activité motrice du MS des patients telle que mesurée par les sous-échelles Quantité d’utilisation et Qualité du mouvement du Motor Activity Log.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité et d’un ECR de qualité acceptable, indiquent que la rééducation du MS utilisant les dispositifs T-WREX ou Pneu-WREX ne sont pas plus efficace que la réadaptation habituelle pour améliorer l’activité motrice du MS de patients en phase chronique de récupération post-AVC.
Amplitude articulaire
Inefficace
2a
Un ECR de qualité acceptable (Housman et al., 2009) a examiné les effets de la rééducation du MS assistée par robot utilisant le système T-WREX (Therapy Wilmington Robotic Exoskeleton) sur la l’amplitude articulaire du MS de patients en phase chronique de récupération post-AVC. Cet ECR de qualité acceptable a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif T-WREX ou la réadaptation habituelle. La rééducation assistée par robot utilise une orthèse passive offrant un soutien au bras contre la gravité lors de l’exécution d’exercices fonctionnels en 3D dans un environnement de réalité virtuelle. De 8 à 9 semaines (après l’intervention), et à 6 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur l’amplitude articulaire du MS.
Conclusion : Des données probantes limitées (niveau 2a), provenant d’un ECR de qualité acceptable, indiquent que la rééducation du MS utilisant le dispositif T-WREX n’est pas plus efficace que la réadaptation habituelle pour améliorer l’amplitude articulaire du MS de patients en phase chronique de récupération post-AVC.
Un ECR de qualité acceptable (Housman et al., 2009) a examiné les effets de la rééducation du MS assistée par robot utilisant le système T-WREX (Therapy Wilmington Robotic Exoskeleton) sur la cinématique du MS de patients en phase chronique de récupération post-AVC. Cet ECR de qualité acceptable a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif T-WREX ou la réadaptation habituelle. La rééducation assistée par robot utilise une orthèse passive offrant un soutien au bras contre la gravité lors de l’exécution d’exercices fonctionnels en 3D dans un environnement de réalité virtuelle. De 8 à 9 semaines (après l’intervention), et à 6 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur la cinématique du MS (atteinte libre – free reaching).
Conclusion : Des données probantes limitées (niveau 2a), provenant d’un ECR de qualité acceptable, indiquent que la rééducation du MS utilisant le dispositif T-WREX n’est pas plus efficace que la réadaptation habituelle pour améliorer la cinématique du MS de patients en phase chronique de récupération post-AVC.
Un ECR de haute qualité (Reinkensmeyer et al., 2012) a examiné les effets de la rééducation du MS assistée par robot utilisant le système Pneu-WREX (Wilmington Robotic Exoskeleton) sur la dextérité de patients en phase chronique de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif Pneu-WREX ou la thérapie habituelle sur table. Tous les patients ont été exposés à l’autre intervention 30 minutes par semaine, par conséquent, chaque groupe a reçu, pour 84% du temps d’intervention, la thérapie à laquelle il était initialement assigné, et 16 % du temps à l’autre thérapie. Le dispositif assisté par robot Pneu-WREX consiste en une série d’exercices horizontaux de l’épaule (abduction/adduction et flexion/extension), de même que par des mouvements avant/arrière et des tâches fonctionnelles exécutés dans un environnement 3D. De 8 à 9 semaines (après l’intervention), et à 6 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur la dextérité des patients telle que mesurée par le Box and Block Test.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation du MS utilisant le dispositif Pneu-WREX n’est pas plus efficace que la réadaptation habituelle pour améliorer la dextérité de patients en phase chronique de récupération post-AVC.
Fonction du MS
Inefficace
1b
Un ECR de haute qualité (Reinkensmeyer et al., 2012) et un ECR de qualité acceptable (Housman et al., 2009) ont examiné les effets de la rééducation du MS assistée par robot utilisant le système T-WREX (Therapy Wilmington Robotic Exoskeleton) ou Pneu-WREX sur la fonction du MS de patients en phase chronique de récupération post-AVC.
L’ECR de haute qualité (Reinkensmeyer et al., 2012) a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif Pneu-WREX ou la thérapie habituelle sur table. Tous les patients ont été exposés à l’autre intervention 30 minutes par semaine, par conséquent, chaque groupe a reçu, pour 84% du temps d’intervention, la thérapie à laquelle il était initialement assigné, et 16 % du temps à l’autre thérapie. Le dispositif assisté par robot Pneu-WREX consiste en une série d’exercices horizontaux de l’épaule (abduction/adduction et flexion/extension), de même que par des mouvements avant/arrière et des tâches fonctionnelles exécutés dans un environnement 3D. De 8 à 9 semaines (après l’intervention), et à 6 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur la fonction du MS des patients telle que mesurée par la Fugl-Meyer Assessment of Upper Extremity Function et le Rancho Los Amigos Functional Test for the Hemiparetic Upper Extremity.
L’ECR de qualité acceptable (Housman et al., 2009) a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif T-WREX ou la réadaptation habituelle. La rééducation assistée par robot utilise une orthèse passive offrant un soutien au bras contre la gravité lors de l’exécution d’exercices fonctionnels en 3D dans un environnement de réalité virtuelle. De 8 à 9 semaines (après l’intervention), aucune différence significative entre les groupes n’a été notée sur la fonction du MS des patients telle que mesurée par la Fugl-Meyer Assessment of Upper Extremity Function et le Rancho Los Amigos Functional Test for the Hemiparetic Upper Extremity. Cependant, à 6 mois (au moment d’un suivi), une différence significative entre les groupes a été relevée sur la mesure de la Fugl-Meyer Assessment of Upper Extremity Function, en faveur de la rééducation du MS assistée par robot comparée à la réadaptation habituelle.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité et d’un ECR de qualité acceptable, indiquent que la rééducation du MS utilisant les dispositifs T-WREX ou Pneu-WREX ne sont pas plus efficace que la réadaptation habituelle pour améliorer la fonction du MS de patients en phase chronique de récupération post-AVC.
Note : Cependant, l’ECR de qualité acceptable a relevé, au moment du suivi de 6 mois, une différence significative entre les groupes sur l’une des mesures de la fonction du MS, en faveur de la rééducation du MS assistée par robot comparée à la réadaptation habituelle.
Force de préhension
Inefficace
1b
Un ECR de haute qualité (Reinkensmeyer et al., 2012) et un ECR de qualité acceptable (Housman et al., 2009) ont examiné les effets de la rééducation du MS assistée par robot utilisant le système T-WREX (Therapy Wilmington Robotic Exoskeleton) ou Pneu-WREX sur la force de préhension de patients en phase chronique de récupération post-AVC.
L’ECR de haute qualité (Reinkensmeyer et al., 2012) a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif Pneu-WREX ou la thérapie habituelle sur table. Tous les patients ont été exposés à l’autre intervention 30 minutes par semaine, par conséquent, chaque groupe a reçu, pour 84% du temps d’intervention, la thérapie à laquelle il était initialement assigné, et 16 % du temps à l’autre thérapie. Le dispositif assisté par robot Pneu-WREX consiste en une série d’exercices horizontaux de l’épaule (abduction/adduction et flexion/extension), de même que par des mouvements avant/arrière et des tâches fonctionnelles exécutés dans un environnement 3D. De 8 à 9 semaines (après l’intervention), et à 6 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur la force de préhension des patients telle que mesurée par un dynamomètre manuel Jamar.
L’ECR de qualité acceptable (Housman et al., 2009) a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif T-WREX ou la réadaptation habituelle. La rééducation assistée par robot utilise une orthèse passive offrant un soutien au bras contre la gravité lors de l’exécution d’exercices fonctionnels en 3D dans un environnement de réalité virtuelle. De 8 à 9 semaines (après l’intervention), et à 6 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur la force de préhension des patients telle que mesurée par un dynamomètre manuel.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité et d’un ECR de qualité acceptable, indiquent que la rééducation du MS utilisant les dispositifs T-WREX ou Pneu-WREX ne sont pas plus efficace que la réadaptation habituelle pour améliorer la force de préhension de patients en phase chronique de récupération post-AVC.
Un ECR de qualité acceptable (Housman et al., 2009) a examiné les effets de la rééducation du MS assistée par robot utilisant le système T-WREX (Therapy Wilmington Robotic Exoskeleton) sur la satisfaction de patients en phase chronique de récupération post-AVC. Cet ECR de qualité acceptable a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif T-WREX ou la réadaptation habituelle. La rééducation assistée par robot utilise une orthèse passive offrant un soutien au bras contre la gravité lors de l’exécution d’exercices fonctionnels en 3D dans un environnement de réalité virtuelle. De 8 à 9 semaines (après l’intervention), et à 6 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur la satisfaction des patients telle que mesurée par un questionnaire non-standardisé.
Conclusion : Des données probantes limitées (niveau 2a), provenant d’un ECR de qualité acceptable, indiquent que la rééducation du MS utilisant le dispositif T-WREX n’est pas plus efficace que la réadaptation habituelle pour améliorer la satisfaction de patients en phase chronique de récupération post-AVC.
Un ECR de haute qualité (Reinkensmeyer et al., 2012) a examiné les effets de la rééducation du MS assistée par robot utilisant le système Pneu-WREX (Wilmington Robotic Exoskeleton) sur la sensibilité de patients en phase chronique de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif Pneu-WREX ou la thérapie habituelle sur table. Tous les patients ont été exposés à l’autre intervention 30 minutes par semaine, par conséquent, chaque groupe a reçu, pour 84% du temps d’intervention, la thérapie à laquelle il était initialement assigné, et 16 % du temps à l’autre thérapie. Le dispositif assisté par robot Pneu-WREX consiste en une série d’exercices horizontaux de l’épaule (abduction/adduction et flexion/extension), de même que par des mouvements avant/arrière et des tâches fonctionnelles exécutés dans un environnement 3D. De 8 à 9 semaines (après l’intervention), et à 6 mois (au moment d’un suivi), aucune différence significative entre les groupes n’a été notée sur la sensibilité des patients telle que mesurée par la Nottingham Sensory Assessment.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation du MS utilisant le dispositif Pneu-WREX n’est pas plus efficace que la réadaptation habituelle pour améliorer la sensibilité de patients en phase chronique de récupération post-AVC.
Phase de récupération non spécifique à une période - GENTLE/S
Amplitude articulaire
Inefficace
2b
Une étude d’une série de cas uniques (Coote et al., 2008) a examiné les effets de la rééducation du MS assistée par robot utilisant le système GENTLE/S sur l’amplitude articulaire du MS de patients en phase subaiguë et chronique de récupération post-AVC. Cette étude d’une série de 20 cas uniques a adopté un modèle de mesures de base multiple et a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le système GENTLE/S, un entraînement du MS avec attelles de soutien, ou aucun entraînement du MS selon un ordre de phase ABC ou ACB. La rééducation utilisant le système GENTLE/S consiste en une série de mouvements dirigés d’atteindre et de retrait du bras parétique sous trois modes : passif, actif-assisté et actif. À la fin de chacune des phases (3 semaines), aucune différence significative n’a été notée sur l’amplitude articulaire active de la flexion de l’épaule.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude d’une série de cas uniques, indiquent que la rééducation du MS utilisant le système GENTLE/S n’est pas plus efficace qu’aucun entraînement du MS ou qu’une intervention comparative (ici, un entraînement avec attelles de soutien) pour améliorer l’amplitude articulaire du MS de patients en phase subaiguë et chronique de récupération post-AVC.
Une étude d’une série de cas uniques (Coote et al., 2008) a examiné les effets de la rééducation du MS assistée par robot utilisant le système GENTLE/S sur la douleur au MS de patients en phase subaiguë et chronique de récupération post-AVC. Cette étude d’une série de 20 cas uniques a adopté un modèle de mesures de base multiple et a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le système GENTLE/S, un entraînement du MS avec attelles de soutien, ou aucun entraînement du MS selon un ordre de phase ABC ou ACB. La rééducation utilisant le système GENTLE/S consiste en une série de mouvements dirigés d’atteindre et de retrait du bras parétique sous trois modes : passif, actif-assisté et actif. À la fin de chacune des phases (3 semaines), aucune différence significative n’a été notée sur la douleur au MS telle que mesurée par une Échelle visuelle analogue.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude d’une série de cas uniques, indiquent que la rééducation du MS utilisant le système GENTLE/S n’est pas plus efficace qu’aucun entraînement du MS ou qu’une intervention comparative (ici, un entraînement avec attelles de soutien) pour réduire la douleur au MS de patients en phase subaiguë et chronique de récupération post-AVC.
Fonction du MS
Inefficace
2b
Une étude d’une série de cas uniques (Coote et al., 2008) a examiné les effets de la rééducation du MS assistée par robot utilisant le système GENTLE/S sur la fonction du MS de patients en phase subaiguë et chronique de récupération post-AVC. Cette étude d’une série de 20 cas uniques a adopté un modèle de mesures de base multiple et a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le système GENTLE/S, un entraînement du MS avec attelles de soutien, ou aucun entraînement du MS selon un ordre de phase ABC ou ACB. La rééducation utilisant le système GENTLE/S consiste en une série de mouvements dirigés d’atteindre et de retrait du bras parétique sous trois modes : passif, actif-assisté et actif. À la fin de chacune des phases (3 semaines), aucune différence significative n’a été notée sur la fonction du MS telle que mesurée par la Fugl Meyer Assessment of Upper Extremity Function. Cependant, une différence significative entre les groupes a été relevée sur une autre mesure de la fonction du MS (la Motor Assessment Scale), en faveur de la rééducation du MS assistée par robot utilisant le système GENTLE/S comparée à l’entraînement du MS avec attelles de soutien.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude d’une série de cas uniques, indiquent que la rééducation du MS utilisant le système GENTLE/S n’est pas plus efficace qu’aucun entraînement du MS pour améliorer la fonction du MS de patients en phase subaiguë et chronique de récupération post-AVC.
Note : Cependant, les résultats sur une mesure du MS indiquent que la rééducation du MS assistée par robot utilisant le système GENTLE/S est plus efficace qu’une intervention comparative (ici, un entraînement avec attelles de soutien) pour améliorer la fonction du MS des patients.
Négligence spatiale unilatérale
Inefficace
2b
Une étude d’une série de cas uniques (Coote et al., 2008) a examiné les effets de la rééducation du MS assistée par robot utilisant le système GENTLE/S sur la négligence spatiale unilatérale de patients en phase subaiguë et chronique de récupération post-AVC. Cette étude d’une série de 20 cas uniques a adopté un modèle de mesures de base multiple et a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le système GENTLE/S, un entraînement du MS avec attelles de soutien, ou aucun entraînement du MS selon un ordre de phase ABC ou ACB. La rééducation utilisant le système GENTLE/S consiste en une série de mouvements dirigés d’atteindre et de retrait du bras parétique sous trois modes : passif, actif-assisté et actif. À la fin de chacune des phases (3 semaines), aucune différence significative n’a été notée sur la négligence spatiale unilatérale des patients telle que mesurée par le Star Cancellation Test.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude d’une série de cas uniques, indiquent que la rééducation du MS utilisant le système GENTLE/S n’est pas plus efficace qu’aucun entraînement du MS ou qu’une intervention comparative (ici, un entraînement avec attelles de soutien) pour améliorer la négligence spatiale unilatérale de patients en phase subaiguë et chronique de récupération post-AVC.
Une étude d’une série de cas uniques (Coote et al., 2008) a examiné les effets de la rééducation du MS assistée par robot utilisant le système GENTLE/S sur la sensibilité du MS de patients en phase subaiguë et chronique de récupération post-AVC. Cette étude d’une série de 20 cas uniques a adopté un modèle de mesures de base multiple et a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le système GENTLE/S, un entraînement du MS avec attelles de soutien, ou aucun entraînement du MS selon un ordre de phase ABC ou ACB. La rééducation utilisant le système GENTLE/S consiste en une série de mouvements dirigés d’atteindre et de retrait du bras parétique sous trois modes : passif, actif-assisté et actif. À la fin de chacune des phases (3 semaines), aucune différence significative n’a été notée sur la sensibilité du MS telle que mesurée par la Nottingham Sensory Assessment.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude d’une série de cas uniques, indiquent que la rééducation du MS utilisant le système GENTLE/S n’est pas plus efficace qu’aucun entraînement du MS ou qu’une intervention comparative (ici, un entraînement avec attelles de soutien) pour améliorer la sensibilité du MS de patients en phase subaiguë et chronique de récupération post-AVC.
Une étude d’une série de cas uniques (Coote et al., 2008) a examiné les effets de la rééducation du MS assistée par robot utilisant le système GENTLE/S sur la spasticité du MS de patients en phase subaiguë et chronique de récupération post-AVC. Cette étude d’une série de 20 cas uniques a adopté un modèle de mesures de base multiple et a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot utilisant le système GENTLE/S, un entraînement du MS avec attelles de soutien, ou aucun entraînement du MS selon un ordre de phase ABC ou ACB. La rééducation utilisant le système GENTLE/S consiste en une série de mouvements dirigés d’atteindre et de retrait du bras parétique sous trois modes : passif, actif-assisté et actif. À la fin de chacune des phases (3 semaines), aucune différence significative n’a été notée sur la spasticité du MS telle que mesurée par la Modified Ashworth Scale.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude d’une série de cas uniques, indiquent que la rééducation du MS utilisant le système GENTLE/S n’est pas plus efficace qu’aucun entraînement du MS ou qu’une intervention comparative (ici, un entraînement avec attelles de soutien) pour réduire la spasticité du MS de patients en phase subaiguë et chronique de récupération post-AVC.
Phase de récupération non spécifique à une période - Robot-Assisted Individual Finger Rehabilitation
Amplitude articulaire
Efficace
1b
Un ECR de haute qualité (Hwang et al., 2012) a examiné les effets de la rééducation du MS assistée par robot sur l’amplitude articulaire du MS de patients en phase subaiguë et chronique de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients pour recevoir une rééducation individuelle des doigts assistée par robot pour une période de 4 semaines, ou une thérapie passive d’une durée de 2 semaines suivie de 2 semaines de rééducation individuelle des doigts assistée par robot. La rééducation individuelle des doigts assistée par robot consiste en un entraînement dirigé qui simule la préhension et le relâchement sous un mode passif, actif-assisté et actif simulé, dans un environnement de réalité virtuelle. Après 2 semaines d’intervention (rééducation assistée par robot vs thérapie passive), 4 semaines d’intervention (rééducation assistée par robot vs thérapie passive + rééducation assistée par robot), et au suivi de 1 mois, une différence significative entre les groupes a été relevée sur l’amplitude articulaire active de la seconde articulation métacarpo-phalangienne, en faveur de la rééducation des doigts assistée par robot.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation individuelle des doigts assistée par robot est plus efficace que des interventions comparatives (ici, une thérapie passive ou une thérapie passive + rééducation assistée par robot) pour améliorer l’amplitude articulaire active de la main de patients en phase subaiguë et chronique de récupération post-AVC.
Un ECR de haute qualité (Hwang et al., 2012) a examiné les effets de la rééducation du MS assistée par robot sur la dextérité de patients en phase subaiguë et chronique de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients pour recevoir une rééducation individuelle des doigts assistée par robot pour une période de 4 semaines, ou une thérapie passive d’une durée de 2 semaines suivie de 2 semaines de rééducation individuelle des doigts assistée par robot. La rééducation individuelle des doigts assistée par robot consiste en un entraînement dirigé qui simule la préhension et le relâchement sous un mode passif, actif-assisté et actif simulé, dans un environnement de réalité virtuelle. Après 2 semaines d’intervention (rééducation assistée par robot vs thérapie passive), 4 semaines d’intervention (rééducation assistée par robot vs thérapie passive + rééducation assistée par robot), et au suivi de 1 mois, aucune différence significative entre les groupes n’a été notée sur la dextérité des patients telle que mesurée par le Nine Hole Peg Test.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation individuelle des doigts assistée par robot n’est pas plus efficace que des interventions comparatives (ici, une thérapie passive ou une thérapie passive + rééducation assistée par robot) pour améliorer la dextérité de patients en phase subaiguë et chronique de récupération post-AVC.
Fonction de la main
Inefficace
1b
Un ECR de haute qualité (Hwang et al., 2012) a examiné les effets de la rééducation du MS assistée par robot sur la fonction de la main de patients en phase subaiguë et chronique de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients pour recevoir une rééducation individuelle des doigts assistée par robot pour une période de 4 semaines, ou une thérapie passive d’une durée de 2 semaines suivie de 2 semaines de rééducation individuelle des doigts assistée par robot. La rééducation individuelle des doigts assistée par robot consiste en un entraînement dirigé qui simule la préhension et le relâchement sous un mode passif, actif-assisté et actif simulé, dans un environnement de réalité virtuelle. Après 2 semaines d’intervention (rééducation assistée par robot vs thérapie passive), 4 semaines d’intervention (rééducation assistée par robot vs thérapie passive + rééducation assistée par robot), et au suivi de 1 mois, aucune différence significative entre les groupes n’a été notée sur la fonction de la main des patients telle que mesurée par le Jebsen Taylor Hand Function Test.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation individuelle des doigts assistée par robot n’est pas plus efficace que des interventions comparatives (ici, une thérapie passive ou une thérapie passive + rééducation assistée par robot) pour améliorer la fonction de la main de patients en phase subaiguë et chronique de récupération post-AVC.
Un ECR de haute qualité (Hwang et al., 2012) a examiné les effets de la rééducation du MS assistée par robot sur la fonction du MS de patients en phase subaiguë et chronique de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients pour recevoir une rééducation individuelle des doigts assistée par robot pour une période de 4 semaines, ou une thérapie passive d’une durée de 2 semaines suivie de 2 semaines de rééducation individuelle des doigts assistée par robot. La rééducation individuelle des doigts assistée par robot consiste en un entraînement dirigé qui simule la préhension et le relâchement sous un mode passif, actif-assisté et actif simulé, dans un environnement de réalité virtuelle. Après 2 semaines d’intervention (rééducation assistée par robot vs thérapie passive), 4 semaines d’intervention (rééducation assistée par robot vs thérapie passive + rééducation assistée par robot), et au suivi de 1 mois, une différence significative entre les groupes a été relevée sur la fonction distale du MS telle que mesurée par la sous-échelle poignet/main de la Fugl-Meyer Assessment of Upper Extremity Function, en faveur de la rééducation des doigts assistée par robot. Cependant, aucune différence significative entre les groupes n’a été notée sur la fonction proximale du MS telle que mesurée par la sous-échelle épaule/coude de la Fugl-Meyer Assessment of Upper Extremity Function, et ce, à aucun des temps de mesure.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation individuelle des doigts assistée par robot est plus efficace que des interventions comparatives (ici, une thérapie passive ou une thérapie passive + rééducation assistée par robot) pour améliorer la fonction distale du MS (mais pas la fonction proximale) de patients en phase subaiguë et chronique de récupération post-AVC.
Force de la pince et de la préhension
Efficace
1b
Un ECR de haute qualité (Hwang et al., 2012) a examiné les effets de la rééducation du MS assistée par robot sur la force de la pince et de la préhension de patients en phase subaiguë et chronique de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients pour recevoir une rééducation individuelle des doigts assistée par robot pour une période de 4 semaines, ou une thérapie passive d’une durée de 2 semaines suivie de 2 semaines de rééducation individuelle des doigts assistée par robot. La rééducation individuelle des doigts assistée par robot consiste en un entraînement dirigé qui simule la préhension et le relâchement sous un mode passif, actif-assisté et actif simulé, dans un environnement de réalité virtuelle. Après 2 semaines d’intervention (rééducation assistée par robot vs thérapie passive), 4 semaines d’intervention (rééducation assistée par robot vs thérapie passive + rééducation assistée par robot), et au suivi de 1 mois, une différence significative entre les groupes a été relevée sur la force de la pince et de la préhension des patients, en faveur de la rééducation des doigts assistée par robot.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation individuelle des doigts assistée par robot est plus efficace que des interventions comparatives (ici, une thérapie passive ou une thérapie passive + rééducation assistée par robot) pour améliorer la force de la pince et de la préhension de patients en phase subaiguë et chronique de récupération post-AVC.
Impact de l'AVC
Inefficace
1b
Un ECR de haute qualité (Hwang et al., 2012) a examiné les effets de la rééducation du MS assistée par robot sur l’impact de l’AVC de patients en phase subaiguë et chronique de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients pour recevoir une rééducation individuelle des doigts assistée par robot pour une période de 4 semaines, ou une thérapie passive d’une durée de 2 semaines suivie de 2 semaines de rééducation individuelle des doigts assistée par robot. La rééducation individuelle des doigts assistée par robot consiste en un entraînement dirigé qui simule la préhension et le relâchement sous un mode passif, actif-assisté et actif simulé, dans un environnement de réalité virtuelle. Après 2 semaines d’intervention (rééducation assistée par robot vs thérapie passive), 4 semaines d’intervention (rééducation assistée par robot vs thérapie passive + rééducation assistée par robot), et au suivi de 1 mois, aucune différence significative entre les groupes n’a été notée sur l’impact de l’AVC tel que mesuré par la Stroke Impact Scale.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation individuelle des doigts assistée par robot n’est pas plus efficace que des interventions comparatives (ici, une thérapie passive ou une thérapie passive + rééducation assistée par robot) pour réduire l’impact de l’AVC de patients en phase subaiguë et chronique de récupération post-AVC.
Un ECR de haute qualité (Hwang et al., 2012) a examiné les effets de la rééducation du MS assistée par robot sur la spasticité du MS de patients en phase subaiguë et chronique de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients pour recevoir une rééducation individuelle des doigts assistée par robot pour une période de 4 semaines, ou une thérapie passive d’une durée de 2 semaines suivie de 2 semaines de rééducation individuelle des doigts assistée par robot. La rééducation individuelle des doigts assistée par robot consiste en un entraînement dirigé qui simule la préhension et le relâchement sous un mode passif, actif-assisté et actif simulé, dans un environnement de réalité virtuelle. Après 2 semaines d’intervention (rééducation assistée par robot vs thérapie passive), 4 semaines d’intervention (rééducation assistée par robot vs thérapie passive + rééducation assistée par robot), et au suivi de 1 mois, aucune différence significative entre les groupes n’a été notée sur la spasticité du coude et du poignet telle que mesurée par l’Ashworth Scale.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation individuelle des doigts assistée par robot n’est pas plus efficace que des interventions comparatives (ici, une thérapie passive ou une thérapie passive + rééducation assistée par robot) pour réduire la spasticité du MS de patients en phase subaiguë et chronique de récupération post-AVC.
Phase de récupération non spécifique à une période - ReoGo
Une étude quasi-expérimentale (Bovolenta et al., 2009) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif ReoGo sur la dextérité de patients en phase subaiguë ou chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif ReoGo. La rééducation assistée consiste en une série d’exercices dirigés qui simulent les mouvements d’atteindre passifs et actifs du coude et de l’épaule parétiques. À 4 semaines (après l’intervention), et à 1 mois (au moment d’un suivi), une amélioration significative a été relevée sur la dextérité des patients telle que mesurée par le Box and Block Test.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système ReoGo est efficace pour améliorer la dextérité de patients en phase subaiguë ou chronique de récupération post-AVC.
Une étude quasi-expérimentale (Bovolenta et al., 2009) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif ReoGo sur la douleur au MS de patients en phase subaiguë ou chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif ReoGo. La rééducation assistée consiste en une série d’exercices dirigés qui simulent les mouvements d’atteindre passifs et actifs du coude et de l’épaule parétiques. À 4 semaines (après l’intervention), aucune amélioration significative n’a été notée sur la douleur au MS des patients telle que mesurée par une Échelle visuelle analogue, cependant, une amélioration significative a été relevée à 1 mois (au moment d’un suivi).
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système ReoGo n’est pas efficace, à court terme, pour améliorer la douleur au MS de patients en phase subaiguë ou chronique de récupération post-AVC.
Note : Cependant, une amélioration significative a été relevée au moment du suivi de 1 mois.
Une étude quasi-expérimentale (Bovolenta et al., 2009) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif ReoGo sur la fonction du MS de patients en phase subaiguë ou chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif ReoGo. La rééducation assistée consiste en une série d’exercices dirigés qui simulent les mouvements d’atteindre passifs et actifs du coude et de l’épaule parétiques. À 4 semaines (après l’intervention), et à 1 mois (au moment d’un suivi), une amélioration significative a été relevée sur la fonction du MS des patients telle que mesurée par la version modifiée de la Fugl-Meyer Assessment of the Upper Extremity et le Frenchay Arm Test.
Note : La fonction du MS a également été mesurée par l’ABILHAND à 1 mois (au moment d’un suivi) ; aucun changement significatif n’a alors été noté.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système ReoGo est efficace pour améliorer la fonction du MS de patients en phase subaiguë ou chronique de récupération post-AVC.
Une étude quasi-expérimentale (Bovolenta et al., 2009) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif ReoGo sur la force musculaire du MS de patients en phase subaiguë ou chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif ReoGo. La rééducation assistée consiste en une série d’exercices dirigés qui simulent les mouvements d’atteindre passifs et actifs du coude et de l’épaule parétiques. À 4 semaines (après l’intervention), une amélioration significative a été relevée sur la force musculaire du deltoïde, du pectoral majeur et du biceps (telle que mesurée par la sous-échelle Force motrice du Medical Research Council), mais pas celle du trapèze, du rotateur interne/externe, du triceps, des fléchisseurs/extenseurs du poignet et du grand dorsal. À 1 mois (au moment d’un suivi), une amélioration significative a été relevée au niveau de la force musculaire du trapèze, du deltoïde, du pectoral majeur, du biceps, du triceps, de l’extenseur du poignet et du grand dorsal, mais pas au niveau du rotateur interne/externe et du fléchisseur du poignet.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système ReoGo est efficace pour améliorer la force musculaire de patients en phase subaiguë ou chronique de récupération post-AVC.
Indépendance fonctionnelle
Efficace
2b
Une étude quasi-expérimentale (Bovolenta et al., 2009) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif ReoGo sur l’indépendance fonctionnelle de patients en phase subaiguë ou chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif ReoGo. La rééducation assistée consiste en une série d’exercices dirigés qui simulent les mouvements d’atteindre passifs et actifs du coude et de l’épaule parétiques. À 4 semaines (après l’intervention), et à 1 mois (au moment d’un suivi), une amélioration significative a été relevée sur l’indépendance fonctionnelle des patients telle que mesurée par la sous-échelle Motricité de la Mesure de l’indépendance fonctionnelle.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système ReoGo est efficace pour améliorer l’indépendance fonctionnelle de patients en phase subaiguë ou chronique de récupération post-AVC.
Une étude quasi-expérimentale (Bovolenta et al., 2009) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif ReoGo sur la mobilité de patients en phase subaiguë ou chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif ReoGo. La rééducation assistée consiste en une série d’exercices dirigés qui simulent les mouvements d’atteindre passifs et actifs du coude et de l’épaule parétiques. À 4 semaines (après l’intervention), aucune amélioration significative n’a été notée sur la mobilité des patients telle que mesurée par le Time Up and Go Test ; cependant, une amélioration significative a été relevée à 1 mois (au moment d’un suivi).
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système ReoGo n’est pas efficace, à court terme, pour améliorer la mobilité de patients en phase subaiguë ou chronique de récupération post-AVC.
Note : Cependant, une amélioration significative a été relevée à 1 mois (au moment d’un suivi).
Qualité de vie
Inefficace
2b
Une étude quasi-expérimentale (Bovolenta et al., 2009) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif ReoGo sur la qualité de vie de patients en phase subaiguë ou chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif ReoGo. La rééducation assistée consiste en une série d’exercices dirigés qui simulent les mouvements d’atteindre passifs et actifs du coude et de l’épaule parétiques. À 1 mois (au moment d’un suivi), aucun changement significatif n’a été noté sur la qualité de vie des patients telle que mesurée par l’Euro-QoL.
Note : La qualité de vie n’a pas été mesurée à 4 semaines, immédiatement après l’intervention.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système ReoGo n’est pas efficace pour améliorer la qualité de vie de patients en phase subaiguë ou chronique de récupération post-AVC.
Une étude quasi-expérimentale (Bovolenta et al., 2009) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif ReoGo sur la satisfaction de patients en phase subaiguë ou chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif ReoGo. La rééducation assistée consiste en une série d’exercices dirigés qui simulent les mouvements d’atteindre passifs et actifs du coude et de l’épaule parétiques. À 4 semaines (après l’intervention), aucun changement significatif n’a été noté sur la satisfaction des patients telle que mesurée par une Échelle visuelle analogue.
Note : La satisfaction n’a pas été mesurée à 1 mois (au moment d’un suivi).
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système ReoGo n’est pas efficace pour améliorer la satisfaction de patients en phase subaiguë ou chronique de récupération post-AVC.
Une étude quasi-expérimentale (Bovolenta et al., 2009) a examiné les effets de la rééducation du MS assistée par robot utilisant le dispositif ReoGo sur la spasticité du MS de patients en phase subaiguë ou chronique de récupération post-AVC. Cette étude quasi-expérimentale a assigné les patients pour recevoir une rééducation du MS assistée par robot utilisant le dispositif ReoGo. La rééducation assistée consiste en une série d’exercices dirigés qui simulent les mouvements d’atteindre passifs et actifs du coude et de l’épaule parétiques. À 4 semaines (après l’intervention), et à 1 mois (au moment d’un suivi), une amélioration significative a été relevée sur la spasticité du coude telle que mesurée par l’Ashworth Scale. Aucun changement significatif n’a été noté sur la spasticité de l’épaule ou du poignet telle que mesurée par l’Ashworth Scale, et ce, à aucun des temps de mesure.
Conclusion : Des données probantes limitées (niveau 2b), provenant d’une étude quasi-expérimentale, indiquent que la rééducation du MS assistée par robot utilisant le système ReoGo est efficace pour améliorer la spasticité du coude (mais pas celle de l’épaule ou du poignet) de patients en phase subaiguë ou chronique de récupération post-AVC.
Phase de récupération non spécifique à une période - UE Robot-Assisted Training
Un ECR de haute qualité (Abdullah et al., 2011) a examiné les effets de la rééducation du MS assistée par robot sur la douleur au MS de patients en phase aiguë et subaiguë de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot ou la réadaptation habituelle. La rééducation du MS assistée par robot utilise un terminal d’interaction robotisé offrant un degré de liberté de niveau 5 pour l’exécution d’exercices de manipulation d’objets et de suivi de trajectoires incorporant des mouvements verticaux et horizontaux sous un mode passif, actif-assisté et actif. De 8 à 11 semaines (après l’intervention), aucune différence significative entre les groupes n’a été notée sur la douleur au MS telle que mesurée par la sous-échelle Inventaire de la douleur de la Chedoke McMaster Stroke Assessment of Arm and Hand.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation du MS assistée par robot n’est pas plus efficace que la réadaptation habituelle pour réduire la douleur au MS de patients en phase aiguë et subaiguë de récupération post-AVC.
Un ECR de haute qualité (Abdullah et al., 2011) a examiné les effets de la rééducation du MS assistée par robot sur la fonction du MS de patients en phase aiguë et subaiguë de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot ou la réadaptation habituelle. La rééducation du MS assistée par robot utilise un terminal d’interaction robotisé offrant un degré de liberté de niveau 5 pour l’exécution d’exercices de manipulation d’objets et de suivi de trajectoires incorporant des mouvements verticaux et horizontaux sous un mode passif, actif-assisté et actif. De 8 à 11 semaines (après l’intervention), une différence significative entre les groupes a été relevée sur la fonction du MS (telle que mesurée par les sous-échelles Bras et Main de la Chedoke McMaster Stroke Assessment of Arm and Hand), en faveur de la rééducation du MS assistée par robot comparée à la réadaptation habituelle.
Note : La fonction du MS a également été mesurée, après l’intervention, par le Chedoke Arm and Hand Activity Inventory ; aucune différence significative entre les groupes n’a alors été noté.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation du MS assistée par robot est plus efficace que la réadaptation habituelle pour améliorer la fonction du MS de patients en phase aiguë et subaiguë de récupération post-AVC.
Un ECR de haute qualité (Abdullah et al., 2011) a examiné les effets de la rééducation du MS assistée par robot sur la satisfaction de patients en phase aiguë et subaiguë de récupération post-AVC. Cet ECR de haute qualité a assigné aléatoirement les patients pour recevoir une rééducation du MS assistée par robot ou la réadaptation habituelle. La rééducation du MS assistée par robot utilise un terminal d’interaction robotisé offrant un degré de liberté de niveau 5 pour l’exécution d’exercices de manipulation d’objets et de suivi de trajectoires incorporant des mouvements verticaux et horizontaux sous un mode passif, actif-assisté et actif. De 8 à 11 semaines (après l’intervention), aucune différence significative entre les groupes n’a été notée sur la satisfaction des patients telle qu’évaluée par une Échelle de Likert à 10 points mesurant l’appréciation et l’amélioration.
Conclusion : Des données probantes modérées (niveau 1b), provenant d’un ECR de haute qualité, indiquent que la rééducation du MS assistée par robot n’est pas plus efficace que la réadaptation habituelle pour améliorer la satisfaction de patients en phase aiguë et subaiguë de récupération post-AVC.
Références
Abdullah, H.A., Tarry, C., Lambert, C., Barreca, S., & O Allen, B. (2011). Results of clinicians using a therapeutic robotic system in an inpatient strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain. rehabilitation unit. Journal of NeuroEngineering and Rehabilitation, 8(50), 1-12.
Aisen, M.L., Krebs, H.I., Hogan, N., McDowell, F., & Volpe, B.T. (1997). The effect of robot-assisted therapy and rehabilitative training on motor recovery following strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain.. Archives of Neurology, 54, 443-6.
Amirabdollahian, F., Loureiro, R., Gradwell, E., Collin, C., Harwin, W., & Johnson, G. (2007). Multivariate analysis of the Fugl-Meyer outcome measures assessment the effectiveness of GENTLE/S robot-mediated strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain. therapy. Journal of NeuroEngineering and Rehabilitation, 4, 1-16.
Bovolenta, F., Goldoni, M., Clerici, P., Agosti, M., & Franceschini, M. (2009). Robot therapy for functional recovery of the upper limbs: a pilot study on patients after strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain.. Journal of Rehabilitation Medicine, 41, 971-5.
Bovolenta, F., Sale, P., Dall’Armi, V., Clerici, P., & Franceschini, M. (2011). Robot-aided therapy for upper limbs in patients with stroke-related lesions. Brief report of a clinical experience. Journal of NeuroEngineering and Rehabilitation, 8(18), 1-6.
Casadio, C., Giannoni, P., Morasso, P., & Sanguineti, V. (2008). A proof of concept study for the integration of robot therapy with physiotherapy in the treatment of strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain. patients. Clinical Rehabilitation, 23, 217-28.
Chang, J-J., Tung, W-L., Wu, W-L., Huang, M-H., & Su, F-C. (2007). Effects of robot-aided bilateral force-induced isokinetic arm training combined with conventional rehabilitation on arm motor function in patients with chronic strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain.. Archives of Physical Medicine and Rehabilitation, 88, 1332-8.
Colombo, R., Sterpi, I., Mazzone, A., Delconte, C., Minuco, G., & Pisano, F. (2010). Measuring changes of movement dynamics during robot-aided neurorehabilitation of strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain. patients. IEEE Transaction on Neural Systems and Rehabilitation Engineering, 18(1), 75-85.
Coote, S., Murphy, B., Harwin, W., & Stokes, E. (2008). The effect of the GENTLE/s robot-mediated therapy system on arm function after strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain.. Clinical Rehabilitation, 22, 395-405.
Connelly, L., Jia, Y., Toro, M.L., Stoykov, M.E., Kenyon, R.V., & Kamper, D.G. (2010). A pneumatic glove and immersive virtual reality environment for hand rehabilitative training after strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain.. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 18(5), 551-9.
Conroy, S.S., Whitall, J., Sipietro, L., Jones-Lush, L.M., Zhan, M., Finley, M.A., Wittenberg, G.F., Krebs, H.I., & Bever, C.T. (2011). Effects of gravity on robot-assisted motor training after chronic strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain.: a randomized trial. Archives of Physical Medicine and Rehabilitation, 92, 1754-61.
Dipietro, L., Krebs, H.I., Volpe, B.T., Stein, J., Bever, C., Mernoff, S.T., Fasoli, S.E., & Hogan, N. (2012). Learning, not adaptation, characterizes strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain. motor recovery: evidence from kinematic changes induced by robot-assisted therapy in rained and untrained task in the same work space. IEEE Transaction on Neural Systems and Rehabilitation Engineering, 20(1), 48-57.
Dovat, L., Lambercy, O., Salman, B., Johnson, V., Milner, T., Gassert, R., Burdet, E., & Leong, T.C. (2010). A technique to train finger coordination and independence after strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain.. Disability and Rehabilitation: Assistive Technology, 5(4), 279-87.
Fasoli, S.E., Krebs, H.I., Ferraro, M., Hogan, N., & Volpe, B.T. (2004). Does shorter rehabilitation limit potential recovery poststroke? Neurorehabiltation and Neural Repair, 18, 88-94.
Fazekas, G., Horvath, M., Troznai, T., & Troth, A. (2007). Robot-mediated upper limb physiotherapy for patients with spastic hemiparesis: a preliminary study. Journal of Rehabilitation Medicine, 39, 580-2.
Fischer, H.C., Stubblefield, K., Kline, T., Luo, X., Kenyon, R.V., & Kamper, D.G. (2007). Hand rehabilitation following strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain.: a pilot study of assisted finger extension training in a virtual environment. Topics in StrokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain. Rehabilitation, 14(1), 1-12.
Frisoli, A., Bergamasco, M, Borelli, L., Montagner, A., Greco, G., Procopio, C., Carboncini, M.C., & Rossi, B. (2009). Robotic assisted rehabilitation in virtual reality with the L-EXOS. Study Health Technology Information Journal, 145, 40-54.
Hesse, S., Shulte-Tigges, G., Konrad, M., Bardeleben, A., & Werner, C. (2003). Robot-assisted arm trainer for the passive and active practice of bilateral forearm and wrist movements in hemiparetic subjects. Archives of Physical Medicine and Rehabilitation, 84, 15-20.
Housman, S.J., Scott, K.M., & Reinkensmeyer, D.J. (2009). A randomized controlled trial of gravity-supported, computer-enhanced arm exercise for individual with severe hemiparesis. Neurorehabilitation and Neural Repair, 23, 505-14.
Hu, X.L., Tong, K.Y., Song, R., Tsang, V.S., Leung, P.O. & Le Li, B. (2007). Variation of muscle coactivation patterns in chronic strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain. during robot-assisted elbow training. Archives of Physical Medicine and Rehabilitation, 88, 1022-9.
Hu, X.L., Tong, K.Y., Song, R., Zheng, X.J., Lui, K.H., Leung, W.W.F., Ng, S., & Au-Yeung, S.S.Y. (2009). Quantitative evaluation of motor functional recovery process in chronic strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain. patients during robot-assisted writ training. Journal of Electromyography and Kinesiology, 19, 639-50.
Hwang, C.H., Seong, J.W., & Son, D-S. (2012). Individual finger synchronized robot-assisted hand rehabilitation in subacute to chronic strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain.: a prospective randomized clinical trial of efficacy. Clinical Rehabilitation, 26(8), 696-704.
Kahn, L.E., Zygman, M.L., Rymer, W.Z., Reinkensmeyer, D.J. (2006). Robot-assisted reaching exercise promotes arm movement recovery in chronic hemiparetic strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain.: a randomized controlled pilot study. Journal of NeuroEngineering and Rehabilitation, 3, 1-13.
Kahn, L.E., Averbuch, M., Rymer, W.Z., & Reinkensmeyer, J. (2001). Comparison of robot-assisted reaching to free reaching in promoting recovery from chronic strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain.. In: Mokhtari M, ed. Integration of Assistive Technology in the Information Age. Amsterdam, The Netherlands: IOS Press: 39-44.
Krebs, H.I., Ferraro, M., Buerger, S.P., Newbery, M.J., Makiyama, A., Sandmann, M., Lynch, D., Volpe, B.T., & Hogan, N. (2004). Rehabilitation robotics: pilot trial of a spatial extension for MIT-Manus. Journal of NeuroEngineering and Rehabilitation, 1, 5.
Lambercy, O., Dovat, L., Yun, H., Wee, S.K., Kuah, C.WK., Chua, K. SG., Gassert, R., Milner, T.E., Teo, C.L., & Burdet, E. (2011). Effects of a robot-assisted training of grasp and pronation/supination in chronic strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain.: a pilot study. Journal of NeuroEngineering and Rehabilitation, 8, 63.
Liao, W., WU, C., Hsieh, Y., Lin, K., & Chang, W. (2011). Effects of robot-assisted upper limb rehabilitation on daily function and real-world arm activity in patients with chronic strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain.: a randomized controlled trial. Clinical Rehabilitation, 26(2), 111-20.
Lo, A.C., Guarino, P.D., Richards, L.G., Haselkorn, J.K., Wittenberg, G.F., Federman, D.G., Ringer, R.J., Wagner, T.H., Krebs, H.I., Volpe, B.T., Bever, C.T Jr., Bravata, D.M., Duncan, P.W., Corn, B.H., Maffucci, A.D., Nadeau, S.E., Conroy, S.S., Powell, J.M., Huang, G.D., & Peduzzi. P (2010). Robot-assisted therapy for long-term upper-limb impairment after strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain.. The New England Journal of Medicine, 362(19), 1772-83.
Lum, P.S., Burgar, C.G., Shor, P.C., Majmundar, M., & Van der Loos, M. (2002). Robot-assisted movement raining compared with conventional therapy techniques for rehabilitation of upper-limb motor function after strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain.. Archives of Physical Medicine and Rehabilitation, 83, 952-9.
Lum, P.S., Burgar, C.G., Van der Loos, M., Shor, P.C., Majmundar, M., & Yap, R. (2006). MIME robotic device for upper-limb neurorehabilitation in subacute strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain. subjects: a follow-up study. Journal of Rehabilitation Research and Development, 43(5), 631-42.
Luft, A.R., McCombe-Waller, S., Whittall, J., Forrester, L.W., Macko, R., Sorkin, J.D., Schulz, J.B., Goldberg, A.P., & Hanley, D.F. (2004). Repetitive bilateral arm training and motor cortex activation in chronic strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain.. Journal of the American Medical Association, 292, 1853-61.
MacClellan, L.R., Brandham, D.D., Whitall, J., Volpe, B., Wilson, P.D., Ohlhoff, J., Meister, C., Hogan, N., Krebs, H.I., & Bever Jr, C.T. (2005). Robotic upper-limb neurorehabilitation in chronic strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain. patients. Journal of Rehabilitation Research and Development, 6, 717-22.
Masiero, S., Armani, M., & Rosati, G. (2011). Upper-limb robot-assisted therapy in rehabilitation of acute strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain. patients: Focused review and results of new randomized controlled trial. Journal of Rehabilitation Research and Development, 48(4), 355-66.
Masiero, S., Celia, A., Rosati, G., & Armani, M. (2007). Robotic-assisted rehabilitation of the upper limb after acute strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain.. Archives of Physical Medicine and Rehabilitation, 88, 142-9.
Mehrholz, J., Hardrich, A., Platz, T., Kugler, J., & Pohl, M. (2012). Electromechanical and robot-assisted arm training for improving generic activitiesAs defined by the International Classification of Functioning, Disability and Health, activity is the performance of a task or action by an individual. Activity limitations are difficulties in performance of activities. These are also referred to as function.
of daily living, arm function, and arm muscle strength after strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain. (Review). Cochrane Database of Systematic Reviews, DIO: 10.1002/14651858.CD006876.pub3.
Nef, T., Quinter, G., Muller, R., & Riener, R. (2009). Effects of arm training with the robotic device ARMin I in chronic strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain.: three single cases. Neurodegenerative Disease, 6, 240-51.
Norouzi-Gheidari, N., Archambault, P.S., & Fung, J. (2012). Effects of robot-assisted therapy on strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain. rehabilitation in upper limbs: systematic reviewA systematic review is a summary of available research on a given topic that compares studies based on design and methods. It summarizes the findings of each, and points out flaws or potentially confounding variables that may have been overlooked. A critical analysis of each study is done in an effort to rate the value of its stated conclusions. The research findings are then summarized, and a conclusion is provided.
and metaanalysis of the literature. Journal of Rehabilitation Research and Development, 49(4), 479-95.
Posteraro, F., Mazzoleni, S., Aliboni, S., Cesqui, B., Battaglia, A., Dario, P., & Micera, S. (2009). Robot-mediated therapy for paretic upper limb of chronic patients following neurological injury. Journal of Rehabilitation Medicine, 41, 976-80.
Rabadi, M.H., Lesser, M., & Volpe. B.T. (2008). A pilot study of activity-based therapy in the arm motor recovery post strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain.: a randomized controlled trial. Clinical Rehabilitation, 22, 1071-82.
Reinkensmeyer, D.J., Wolbrech, E.T., Chan, V., Chou, C., Cramer, S.C., & Bobrow, J.E. (2012). Comparison of three-dimensional, assist-as-needed robotic arm-hand movement training provided with Pneu-WREX to conventional tabletop therapy after strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain.. American Journal of Medicine and Rehabilitation, 91(11), 232-41.
Rosati, G., Gallina, P., & Masiero, S. (2007). Design, implementation and clinical tests of a wire-based robot for neurorehabilitation. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 15(4), 560-9.
Song, R., Tong, K., Hu, X., & Le Li, B. (2008). Assistive control system using continuous myoelectric signal in robot-aided arm training for patients after strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain.. IEEE Transaction on Neural Systems and Rehabilitation Engineering, 16(4), 371-9.
Staubli, P., Nef, T., Klamroth-Marganska, V., & Reiner, R. (2009). Effects of intensive arm training with the rehabilitation robot ARMin II in chronic strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain. patients: four single-cases. Journal of NeuroEngineering and Rehabilitation, 6(46), 1-10.
Stein, J., Narendran, K., McBean, J., Krebs, K., & Hughes, R. (2007). Electromyography-controlled exoskeletal upper-limb-powered orthosis for exercise training after strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain.. American Journal of Physical Therapy and Rehabilitation, 86, 255-61.
Vergaro, E., Casadio, M, Squeri V., Giannoni, P., Morasso, P., & Sanguineri, V. (2010). Self-adaptive robot training of strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain. survivors for continuous tracking movements. Journal of NeuroEngineering and Rehabilitation, 7(13), 1-12.
Volpe, B.T., Krebs, H.I., Hogan, N., Edelstein, L., Diels, C., & Aisen, M. (1999). Robot-training enhanced motor outcome in patients with strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain. maintained over 3 years. Neurology, 53(8), 1874-6.
Volpe, B.T., Krebs, H.I., Hogan, N., Edelstein, L., Diels, C., & Aisen, M. (2000). A novel approach to strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain. rehabilitation: Robot-aided sensorimotor stimulation. Neurology, 54(10), 1938-44.
Volpe, B.T., Lynch, D., Rykman-Berland, A., Ferraro, M., Galgano, M., Hogan, N., & Krebs, H.I. (2008). Intensive sensorimotor arm training mediated by therapist or robot improves hemiparesis in patients with chronic strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain.. Neurorehabilitation and Neural Repair, 22(3), 305-10.
Whitall, J., McCombe Waller, S., Silver, K.H.C., & Macko, R.F. (2000). Repetitive bilateral arm training with rhythmic auditory cueing improves motor function in chronic hemiparetic strokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain.. StrokeAlso called a "brain attack" and happens when brain cells die because of inadequate blood flow. 20% of cases are a hemorrhage in the brain caused by a rupture or leakage from a blood vessel. 80% of cases are also know as a "schemic stroke", or the formation of a blood clot in a vessel supplying blood to the brain., 31, 2390-5.
Zollo, L., Rossini, L., Bravi, M., Magrone, G., Sterzi S., & Guglielmelli, E. (2011). Quantitative evaluation of upper-limb motor control in robot-aided rehabilitation. Medical Biological Engineering and Computing, 49, 1131-44.
Études exclues :
Burgar, C.G., Lum, P.S., Scremin, A.M., Garber, S.L., Van der Loos, H.F., & Kenney, D. (2011). Robot-assisted upper-limb therapy in acute rehabilitation setting following stroke: Department of Veterans Affairs multisite clinical trial. Journal of Rehabilitation Research and Development, 48(4), 445-58.
Motif d’exclusion : Cet article compare deux intensités différentes d’entraînement assisté par robot (faible et forte dose) à une thérapie habituelle, l’étude portant sur l’intensité de l’intervention.
Burgar, C.G., Lum, P.S., Shor, P.C., Machiel Van der Loos, H.F. (2000). Development of robots for rehabilitation therapy: the Palo Alto VA/ Stanford experience. Journal of Rehabilitation Research and Development, 37, 663–73.
Motif d’exclusion : Cet article résume les résultats préliminaires des essais cliniques qui sont inclus dans cette revue.
Daly, J.J., Hogan, N., Perepezko, E.M., Krebs, H.I., Rogers, JM., & Goyal, K.S. (2005). Response to upper-limb robotics and functional neuromuscular stimulation following stroke. Journal of Rehabilitation Research and Development, 42 (6), 723-36.
Motif d’exclusion : Cet article compare l’entraînement assisté par robot à la stimulation neuromusculaire. Les études où la stimulation neuromusculaire est utilisée ne sont pas actuellement incluses dans ce module Info-AVC.
Hesse, S., Werner, C., Pohl, M., Rueckriem, S., Mehrholz, J., & Lingnau, M.L. (2005). Computerized arm training improves the motor control of the severely affected arm after stroke: a single-blinded randomized trial in two centers. Stroke, 36(9), 1960-6.
Motif d’exclusion : Cet article compare l’entraînement assisté par robot à la stimulation électrique fonctionnelle. Les études où la stimulation électrique fonctionnelle est utilisée ne sont pas actuellement incluses dans ce module Info-AVC.
Hollenstein, C. & Cabri, C. (2011). [Zusatztherapie mit computerunterstutztem Trainingssystem im Bergleich zu ergotherapeutischer Armgruppentherapie]. Neurorehabilitation, 3(1), 40-2.
Motif d’exclusion : Cet article est publié en allemand.
Hsieh, Y.W., Wu, C.Y., Liao, W.W., Lin, K.C., Wu, K.Y., & Lee, C.Y. (2011). Effects of treatment intensity in upper limb robot-assisted therapy for chronic stroke: a pilot randomized controlled trial. Neurorehabilitation and Neural Repair, 25(6), 503-11.
Motif d’exclusion : Cet article compare deux intensités différentes d’entraînement assisté par robot (faible et forte dose) à une thérapie habituelle, l’étude portant sur l’intensité de l’intervention.
Johnson, M.J., Feng, X., Johnson, L.M., & Winters, J.M (2007). Potential of a suite of robot/computer-assisted motivating systems for personalized, home-based, stroke rehabilitation. Journal of NeuroEngineering and Rehabilitation, 5(6), 1-17.
Motif d’exclusion : Il s’agit d’une étude de faisabilité quantifiant la performance motrice immédiate et l’activation musculaire entre les différents appareils.
Mayr, A., Kofler, M., & Saltuari, L. (2008). ARMOR: an electromechanical robot for upper limb training following stroke. A prospective randomized controlled pilot study. Handchirurgie, Mikrochirurgie, Plastische Chirurgie, 40(1), 66-73.
Motif d’exclusion : Cet article compare l’entraînement assisté par robot à la stimulation électrique fonctionnelle. Les études où la stimulation électrique fonctionnelle est utilisée ne sont pas actuellement incluses dans ce module Info-AVC.